| Control System Toolbox関数リファレンス |
ss
表示
sys = ss(a,b,c,d) sys = ss(a,b,c,d,Ts) sys = ss(d) sys = ss(a,b,c,d,ltisys) sys = ss(a,b,c,d,'Property1',Value1,...,'PropertyN',ValueN) sys = ss(a,b,c,d,Ts,'Property1',Value1,...,'PropertyN',ValueN) sys_ss = ss(sys) sys_ss = ss(sys,'minimal')
詳細
関数ssは、実数値状態空間モデル(SSオブジェクト)を作成するか、伝達関数または零点-極-ゲインモデルを状態空間型に変換します。
状態空間モデルの作成
sys = ss(a,b,c,d) は、連続系状態空間モデル
を作成します。
出力sysは、モデルデータを格納するSSオブジェクトです(マニュアルの"状態空間モデル"を参照)。![]() の場合、
の場合、dの大きさに拘わらず、dをスカラ0(ゼロ)に設定するだけで済みます。
sys = ss(a,b,c,d,Ts)
は、サンプル時間Ts(秒単位)をもつ離散系状態空間モデル
を作成します。サンプル時間を未設定のままにするには、Ts
= -1、または、Ts = []を設定します。
sys = ss(d) は、静的ゲイン行列![]() を設定し、つぎのステートメントと等価です。
を設定し、つぎのステートメントと等価です。
sys = ss([],[],[],d)
sys = ss(a,b,c,d,ltisys) は、(サンプル時間を含め)LTIモデルltisysから継承した一般的LTIプロパティをもつ状態空間モデルを作成します。一般的なLTIプロパティの概要については、マニュアルの"基本的なプロパティ"を参照してください。
状態空間モデルの配列の作成法に関する情報については、マニュアルの"LTI配列の作成"を参照してください。
前の表示のいずれにも、つぎのプロパティ/値の組み合わせを後に続けることができます。
'PropertyName',PropertyValue
それぞれの組み合わせは、入力名またはモデル履歴に関する注釈など、モデル固有のLTIプロパティを設定します。詳細については、setの部分とつぎの例題を参照してください。
sys = ss(a,b,c,d,'Property1',Value1,...,'PropertyN',ValueN)
sys = ss(a,b,c,d) set(sys,'Property1',Value1,...,'PropertyN',ValueN)
状態空間への変換
sys_ss = ss(sys)
は、任意のTFまたはZPKモデルsysを状態空間に変換します。出力sys_ssは、等価な状態空間モデル(SS
オブジェクト)です。この操作を、状態空間実現と言います。
sys_ss = ss(sys,'minimal')は、可制御性に関する状態と可観測性に関する状態をもつ状態空間実現を作成します。
例題 1
sys = ss(A,B,C,D,0.05,'statename',{'position' 'velocity'},...
'inputname','force',...
'notes','Created 10/15/96')
は、行列![]() とサンプル時間0.05秒をもつ離散系モデルを作成します。このモデルには、
とサンプル時間0.05秒をもつ離散系モデルを作成します。このモデルには、positionとvelocityという名前の2つの状態とforceという名前の1つの入力があります(![]() の次元は、状態数と入力数と整合性が取れていなければなりません)。最終的に、モデル作成日付に関する注釈も付けます。
の次元は、状態数と入力数と整合性が取れていなければなりません)。最終的に、モデル作成日付に関する注釈も付けます。
例題 2
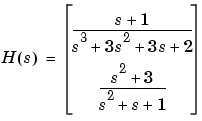
の状態空間実現を計算します。 つぎのように入力してください。
H = [tf([1 1],[1 3 3 2]) ; tf([1 0 3],[1 1 1])]; sys = ss(H); size(sys) State-space model with 2 outputs, 1 input, and 5 states.
状態数は、H(s)のSISOの部分の累積の次数と等価になります。
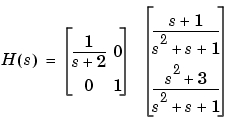
sys = ss(H,'min'); size(sys) State-space model with 2 outputs, 1 input, and 3 states.
結果の状態空間モデルの次数は3で、H(s)を表現するのに必要な最小の状態数です。これは、H(s)を1次のシステムと2次のシステムの積として直接分解することによっても理解できます。
参考
dss ディスクリプタ状態空間モデルの設定
frd FRDモデルと作成、または、FRDモデルへの変換
get LTIモデルのプロパティを抽出
set LTIモデルのプロパティの設定
ssdata 状態空間モデルの![]() 行列を抽出
行列を抽出
tf 伝達関数の設定または伝達関数への変換
zpk 零点-極-ゲインモデルの設定または零点-極-ゲインモデルへの変換
| sminreal | ss2ss |