

| Control System Toolbox関数リファレンス | |
状態フィードバックゲインとKalman推定器を与えて、LQGレギュレータを作成
表示
rlqg = lqgreg(kest,k) rlqg = lqgreg(kest,k,'current') % 離散時間のみ rlqg = lqgreg(kest,k,controls)
詳細
lqgreg
は、kalmanで設計したKalman推定器とlqr、dlqr、またはlqryのいずれかで設計した最適状態フィードバックゲインを結合することによって、LQGレギュレータを作成します。LQGレギュレータは、レギュレーション性能と制御効果との間の調整を行う2次型のコスト関数を最小にします。このレギュレータは、ダイナミックで、ノイズの多い出力測定値に応じて調整指令を作成します。

を作成します。ここで、 はKalman状態推定値です。レギュレータの状態空間方程式は、つぎのようになります。
はKalman状態推定値です。レギュレータの状態空間方程式は、つぎのようになります。
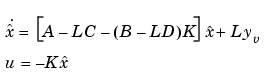
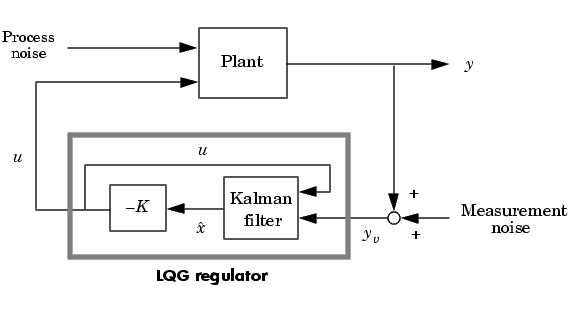
ここで、 は、プラント出力測定値のベクトルです(背景および表記については、
は、プラント出力測定値のベクトルです(背景および表記については、kalmanを参照してください)。つぎの図は、プラントに関するこのダイナミックレギュレータを示しています。
離散系では、 までの観測値に基づく
までの観測値に基づく の予測値
の予測値 か、
か、 を含むすべての利用可能な測定値に基づく現在の状態推定値
を含むすべての利用可能な測定値に基づく現在の状態推定値 のどちらかを使って、LQGレギュレータを作成することができます。レギュレータ
のどちらかを使って、LQGレギュレータを作成することができます。レギュレータ

は、 が可逆である場合にのみ因果性をもちます(表記については、
が可逆である場合にのみ因果性をもちます(表記については、kalmanを参照)。さらに、現在のレギュレータの具体的実現は、観測値 が一度利用できると、
が一度利用できると、 を計算するための処理時間が必要になります(これは、フィードバックループの中のむだ時間となります)。
を計算するための処理時間が必要になります(これは、フィードバックループの中のむだ時間となります)。
使用方法
rlqg = lqgreg(kest,k) は、Kalman推定器kestおよび状態フィードバックゲイン行列kを与えて、LQGレギュレータrlqg(状態空間モデ)を出力します。同じ関数が、連続系と離散系の両方のケースを扱います。 kestとkの設計には、以下のように矛盾がないようにします。
lqrまたはlqryおよびkalmanを使用 dlqrまたはlqryおよびkalmanを使用lqrdおよびkalmdを使用 を作成します("詳細"を参照)。代わりに現在のLQGレギュレータ

rlqg = lqgreg(kest,k,'current')
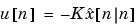
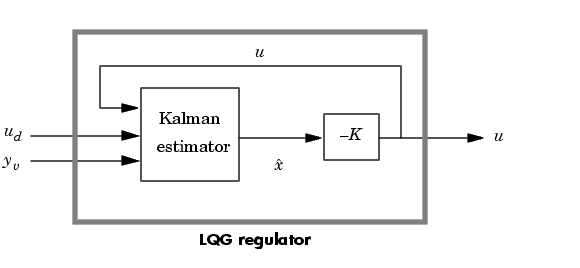
rlqg = lqgreg(kest,k,controls)は、付加的な既知プラント入力 にアクセスする推定器を取り扱います。インデックスベクトル
にアクセスする推定器を取り扱います。インデックスベクトルcontrolsは、どの推定器入力が制御 であるかを設定し、結果として得られるLQGレギュレータ
であるかを設定し、結果として得られるLQGレギュレータrlqgは、入力として、 と
と をもっています(つぎの図を参照)。
をもっています(つぎの図を参照)。
例題
"LQGレギュレータ"を参照してください。
参考
kalman
kalmd
lqrd
lqry
reg 状態フィードバックゲインと推定器ゲインを与え、レギュレータを作成ゲイン
| | lft | lqr | |
