

| Control System Toolbox関数リファレンス | |
表示
[kest,L,P] = kalman(sys,Qn,Rn,Nn) [kest,L,P,M,Z] = kalman(sys,Qn,Rn,Nn) % 離散時間のみ [kest,L,P] = kalman(sys,Qn,Rn,Nn,sensors,known)
詳細
kalman
は、プラントの状態空間モデルおよびプロセス、測定ノイズ共分散データを与えて、Kalman状態推定器を設計します。Kalman推定器は、つぎの連続系または離散系推定問題に対する最適解です。


を満足するものとします。この連続プラントは、定常状態偏差の共分散

 を作成します。
を作成します。
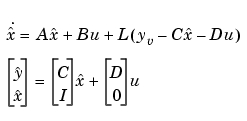
をもつKalmanフィルタです。この場合、フィルタゲイン は、代数Riccati方程式を解くことによって決定されます。この推定器は、既知の入力
は、代数Riccati方程式を解くことによって決定されます。この推定器は、既知の入力 と観測値
と観測値 を使って、出力推定
を使って、出力推定 および状態推定
および状態推定 を作成します。
を作成します。 は、真のプラント出力
は、真のプラント出力

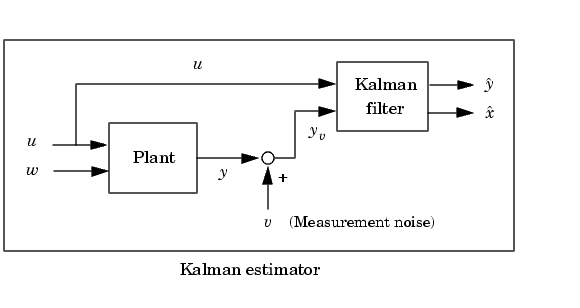


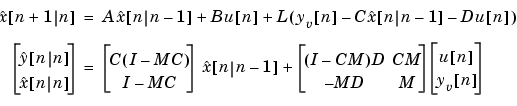
をもち、 を含む利用可能なすべての観測値を使って、最適の"現在の"出力
を含む利用可能なすべての観測値を使って、最適の"現在の"出力 および、状態推定値
および、状態推定値 を作成します。ゲイン行列
を作成します。ゲイン行列 および
および は、離散系Riccati方程式を解くことによって導かれます。イノベーションゲイン
は、離散系Riccati方程式を解くことによって導かれます。イノベーションゲイン は、つぎの新しい観測値
は、つぎの新しい観測値 を使って、予測値
を使って、予測値 を更新するために使用します。
を更新するために使用します。

使用方法
[kest,L,P] = kalman(sys,Qn,Rn,Nn)は、プラントモデルsysおよびノイズ共分散データQn、Rn、Nn(上の行列 )が与えられた場合、Kalman推定器の状態空間モデル
)が与えられた場合、Kalman推定器の状態空間モデルkestを出力します。sysは、行列をもつ状態空間モデルでなければなりません。
結果として得られる推定器kestは、入力として 、および出力(あるいは、それらの離散系の相当値)として
、および出力(あるいは、それらの離散系の相当値)として をもっています。
をもっています。 の場合、最後の引数
の場合、最後の引数Nnは省略できます。
関数kalmanは、連続系、離散系いずれの問題も取り扱い、sysが連続系であれば連続系推定器を作成し、他の場合、離散系推定器を作成します。連続系では、kalmanは、KalmanゲインLと定常状態偏差の共分散行列Pも出力します。Pは、関連するRiccati方程式の解であることに注意してください。離散系では構文
[kest,L,P,M,Z] = kalman(sys,Qn,Rn,Nn)
は、フィルタゲイン とイノベーションゲイン
とイノベーションゲイン および定常状態偏差の共分散
および定常状態偏差の共分散

を出力します。 最終的に、より一般的なプラントsysに対して、構文
[kest,L,P] = kalman(sys,Qn,Rn,Nn,sensors,known) [kest,L,P,M,Z] = kalman(sys,Qn,Rn,Nn,sensors,known)
を用います。この場合は、既知の入力 と確率的入力
と確率的入力 が混在し、すべての出力が観測されるわけではありません。その時点で、既知のインデックスベクトル
が混在し、すべての出力が観測されるわけではありません。その時点で、既知のインデックスベクトルsensorsとknownは、sysのどの出力 が観測され、どの入力
が観測され、どの入力 が既知であるかを設定します。他のすべての入力は、確率的であると見なされます。
が既知であるかを設定します。他のすべての入力は、確率的であると見なされます。
例題
マニュアルの"制御設計ツール"、"x-軸に対するLQG設計"、"カルマンフィルタ"を参照してください。
制限
プラントおよびノイズデータは、以下を満足する必要があります。
 は検出可能
は検出可能  と
と 
 は、虚軸上に非可制御モードをもっていません。
は、虚軸上に非可制御モードをもっていません。 
参考
care
dare
estim
kalmd
lqgreg
lqr
参考文献
[1] Franklin, G.F., J.D. Powell, and M.L. Workman, Digital Control of Dynamic Systems, Second Edition, Addison-Wesley, 1990.
| | issiso | kalmd | |
 とプロセスノイズ、測定白色ノイズ
とプロセスノイズ、測定白色ノイズ は、
は、