

| Control System Toolbox関数リファレンス | |
状態フィードバックゲインと推定器ゲインを与えて、レギュレータを作成
表示
rsys = reg(sys,K,L) rsys = reg(sys,K,L,sensors,known,controls)
詳細
rsys = reg(sys,K,L)
は、プラントの状態空間モデルsys、状態フィードバックゲイン行列K、推定器ゲイン行列Lを与えて、ダイナミックレギュレータまたは補償器rsysを作成します。ゲインKおよびLは、一般に極配置法またはLQG法を使って設計されます。関数regは、連続系と離散系の両方のケースを取り扱います。
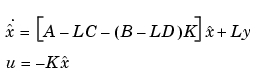
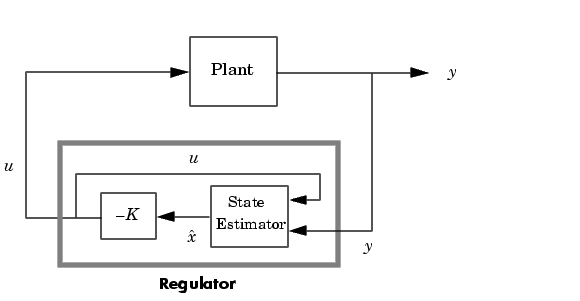
この構文では、sysのすべての入力が制御入力であり、すべての出力が観測されることを仮定しています。レギュレータrsysは、状態フィードバック則 とゲイン行列
とゲイン行列Lをもつ状態推定器とを結合することによって得られます(estimを参照)。
をもつプラントの場合、レギュレータは、つぎのように得られます。
このレギュレータは、正 のフィードバックを使ってプラントに結合しなければなりません。
rsys = reg(sys,K,L,sensors,known,controls)
は、より一般的なレギュレーション問題を取り扱います。ここで、
 、既知の入力
、既知の入力 、および確率入力
、および確率入力 から構成されます。
から構成されます。  のみが観測されます。
のみが観測されます。インデックスベクトルsensors、knownおよびcontrols は、 、
、 および
および を
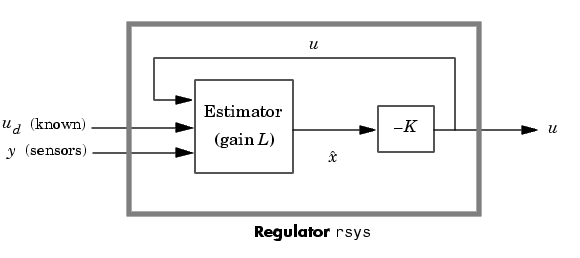
をsysの出力および入力の部分集合として設定します。結果として得られるレギュレータは、 を指令値を作成するための入力
を指令値を作成するための入力 として使用します(つぎの図を参照してください)。
として使用します(つぎの図を参照してください)。
例題
sys = ss(A,B,C,D)
が与えられて、以下の設計を既に行っているものと仮定しています。
KLの状態推定器 つぎにコントローラと推定器を結合して、つぎのように完全なレギュレーションシステムを作成することができます。
controls = [1,2,4]; sensors = [4,7,1]; known = [3]; regulator = reg(sys,K,L,sensors,known,controls)
参考
estim
kalman
lqgreg
place
| | pzmap | reshape | |