

| Control System Toolbox関数リファレンス | |
表示
[kest,L,P,M,Z] = kalmd(sys,Qn,Rn,Ts)
詳細
kalmd
は、kalmanで設計される連続系推定器と同様な応答特性をもつ離散系Kalman推定器を設計します。このコマンドは、満足する連続系推定器が設計された後で、ディジタル化のための離散系推定器を導くのに有効です。
[kest,L,P,M,Z] = kalmd(sys,Qn,Rn,Ts)
は、連続系プラントに対して、サンプル時間Tsをもつ離散系Kalman推定器kestを作成します。


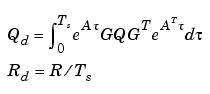
を満足します。 推定器kestは、つぎのようにして導きます。連続系プラントsysは、まずサンプル時間Tsでゼロ次ホールドを使って離散化され(上記のc2d の項を参照)、連続系ノイズ共分散行列 および
および は、それらの等価な離散系ノイズ共分散
は、それらの等価な離散系ノイズ共分散
kalmanを参照してください。
kalmdは、推定器ゲインLとMも出力し、離散系偏差の共分散行列PとZも出力します(詳細については、kalmanを参照してください)。
制限
離散化した問題データは、 kalmanの必要条件を満足しなければなりません。
参考
kalman
lqgreg
lqrd
参考文献
[1] Franklin, G.F., J.D. Powell, and M.L. Workman, Digital Control of Dynamic Systems, Second Edition, Addison-Wesley, 1990.
[2] Van Loan, C.F., "Computing Integrals Involving the Matrix Exponential," IEEE Trans. Automatic Control, AC-15, October 1970.
| | kalman | lft | |
 と観測ノイズ
と観測ノイズ は、
は、