| Control System Toolbox関数リファレンス | |
表示
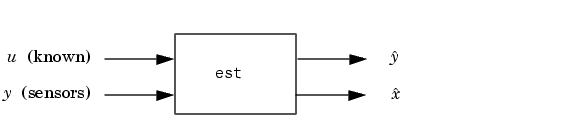
est = estim(sys,L) est = estim(sys,L,sensors,known)
詳細
est = estim(sys,L)
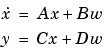
は、プラント状態空間モデルsysと推定器ゲインLを与えて、状態/出力推定器estを作成します。sysのすべての入力 は確率的(プロセスノイズおよび測定ノイズ)と見なされ、すべての出力
は確率的(プロセスノイズおよび測定ノイズ)と見なされ、すべての出力 が測定されています。推定器
が測定されています。推定器estは、状態空間型(SSオブジェクト)で出力されます。つぎの方程式
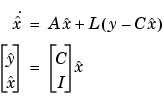
 と状態推定
と状態推定 を作成します。
を作成します。
est = estim(sys,L,sensors,known)
は、既知の入力 と確率的な入力
と確率的な入力 および測定出力
および測定出力 と非測定出力
と非測定出力 をもつ、より一般的なプラント
をもつ、より一般的なプラントsysを取り扱います。
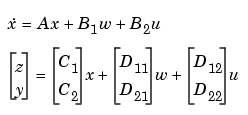
インデックスベクトルsensorsとknownは、sysのどの出力 を測定し、どの入力
を測定し、どの入力 が既知であるかを設定します。結果として得られる推定器
が既知であるかを設定します。結果として得られる推定器estは、 と
と を使って、つぎの出力と状態推定を作成します。
を使って、つぎの出力と状態推定を作成します。
estimは、連続系と離散系の両方を取り扱います。関数place(極配置)またはkalman(カルマンフィルタリング)を使って、適切な推定器のゲイン を設計することができます。推定器の極(
を設計することができます。推定器の極( の固有値)は、正確な推定を保証するために、プラントダイナミクス(
の固有値)は、正確な推定を保証するために、プラントダイナミクス( の固有値)より速くなければならないことに注意してください。
の固有値)より速くなければならないことに注意してください。
例題
7出力と 4入力をもつ状態空間モデルsysを考えます。センサの測定値としてプラントの出力4、7、1を使い、既知入力としてプラントの入力1、4、3を使って、Kalmanゲイン行列 を設計したと仮定します。すると、
を設計したと仮定します。すると、
sensors = [4,7,1]; known = [1,4,3]; est = estim(sys,L,sensors,known)
kalmanによって、Kalman推定器を作成することができます。
参考
kalman
place
reg
| | esort | evalfr | |