| Getting Started | |
根軌跡
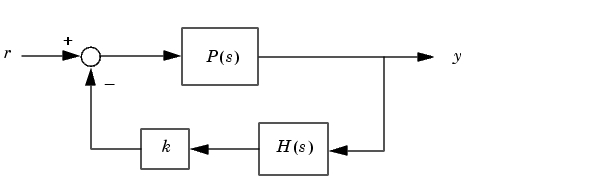
根軌跡法は、一つのパラメータを連続的に変化させて、フィードバックシステムの閉ループ極の軌跡の記述を使用するものです。一般的に、根軌跡法は、SISO制御システムの閉ループ極を設定するために、フィードバックゲインのチューニングに使われます。
ここで、 はプラント、
はプラント、 はセンサダイナミックス、
はセンサダイナミックス、 は、調整に使用するスカラゲインです。閉ループの極は、つぎの方程式の根で表わせます。
は、調整に使用するスカラゲインです。閉ループの極は、つぎの方程式の根で表わせます。

根軌跡法は、 が変化するに連れ、複素プラントないの閉ループ極の軌跡をプロットするものです。このプロットを使って、閉ループ極の設定した組に関連したゲインを識別します。
が変化するに連れ、複素プラントないの閉ループ極の軌跡をプロットするものです。このプロットを使って、閉ループ極の設定した組に関連したゲインを識別します。
根軌跡設計の基本コマンドは、rlocusです。このコマンドは、一つの引数、関数ss、tf、zpkのいずれかを使って作成した開ループシステムのSISOモデル、を使います。前のページで示したトラッキングループの中で、このモデルは、 を表わしています。また、関数
を表わしています。また、関数rlocfindを使って、根軌跡図上の一点を選択して、対応するゲイン を決定することもできます。
を決定することもできます。
| 根軌跡の設計 | |
|
極-零点図 |
|
根軌跡設計GUI |
|
根のゲインの会話型選択 |
|
Evans 根軌跡図 |
|
根軌跡図の のグリッド(連続系) のグリッド(連続系) |
|
根軌跡図の のグリッド(離散系) のグリッド(離散系) |
| | 補償器設計用のコマンド | 極配置 | |