

| Getting Started | |
極配置
閉ループの極の位置は、立ち上がり時間、整定時間、遷移部の振動等の時間応答特性に直接影響します。閉ループの挙動をチューニングする方法を議論しましょう。
極配置は、システムの情態空間モデルを必要とします(関数ssを使って、他のLTIモデルから状態空間モデルに変換)。連続時間では、このようなモデルは、つぎのように表わせます。
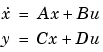
ここで、 は制御入力ベクトル、
は制御入力ベクトル、 は測定ベクトルです。このシステムのダイナミックス補償器を設計することは、2つのステップ、状態フィードバックゲインの選択、状態エスティメータの設計、を含んでいます。
は測定ベクトルです。このシステムのダイナミックス補償器を設計することは、2つのステップ、状態フィードバックゲインの選択、状態エスティメータの設計、を含んでいます。
状態フィードバックゲインの選択
状態フィードバック のもとで、閉ループのダイナミックスは、つぎの方程式で表わせます。
のもとで、閉ループのダイナミックスは、つぎの方程式で表わせます。
そして、閉ループの極は、 の固有値です。極配置アルゴリズムを使って、複素平面内で希望する位置に極を配置できるゲイン行列
の固有値です。極配置アルゴリズムを使って、複素平面内で希望する位置に極を配置できるゲイン行列 を計算することができます( (A,B) は可制御である)。
を計算することができます( (A,B) は可制御である)。
状態エスティメータの設計
全状態 が測定されない限り、状態フィードバック則
が測定されない限り、状態フィードバック則 を実現することはできません。しかし、状態フィードバック則
を実現することはできません。しかし、状態フィードバック則 は、同じ極が割り当てた性質を維持するように、状態推定
は、同じ極が割り当てた性質を維持するように、状態推定 を作成することができます。このことは、状態エスティメータを設計するつぎの型で実現できます。
を作成することができます。このことは、状態エスティメータを設計するつぎの型で実現できます。

エスティメータの極は、 の固有値で、エスティメータのゲイン行列
の固有値で、エスティメータのゲイン行列 の適切な選択で、任意に割り当てることができます。大雑把に言って、エスティメータのダイナミックスは、コントローラのダイナミックス(
の適切な選択で、任意に割り当てることができます。大雑把に言って、エスティメータのダイナミックスは、コントローラのダイナミックス( の固有値)より高速です。
の固有値)より高速です。
 を
を  の推定値
の推定値 との置き換えは、ダイナミック出力フィードバック補償器
との置き換えは、ダイナミック出力フィードバック補償器
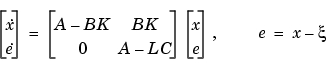
となることに注意してください。そのため、 と
と の固有値を独立に置き換えることで、すべての閉ループ極を割り当てることができます。
の固有値を独立に置き換えることで、すべての閉ループ極を割り当てることができます。
極配置ツール
Control System Toolboxは、つぎの機能をもつ関数を用意しています。
 と
と を計算
を計算| 極配置 | |
|
SISO極配置 |
|
エスティメータゲインを設定して、状態エスティメータを作成 |
|
MIMO極配置 |
|
状態フィードバックとエスティメータゲインを設定して、出力フィードバック補償器を作成 |
関数ackerは、SISOシステムのみに使用が限定され、かつ、状態数が少ない場合にのみ使用可能です。関数placeは、関数ackerより一般的で、数値的にもロバストです。
| 警告
極配置は、不安定な極の位置を選択した場合、条件数が非常に悪くなります。特に、つぎのことは避けてください。 重根を配置する 弱い可制御性、可観測性に極を移動させます。これには、一般に、高いゲインを必要とします。すなわち、外乱に非常に敏感な全閉ループ固有構造を作成することになります。 |
| | 根軌跡 | 線形二次ガウシアン(LQG)設計 | |