

| Control System Toolbox関数リファレンス | |
表示
sys = series(sys1,sys2) sys = series(sys1,sys2,outputs1,inputs2)
詳細
series
sys = series(sys1,sys2)
は、つぎに示すような基本直列結合を形成します。
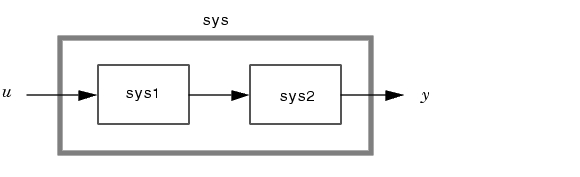
sys = sys2 * sys1
(LTIモデルの乗算の詳細については、マニュアルの"乗算"を参照してください)
sys = series(sys1,sys2,outputs1,inputs2)
は、つぎのような、より一般的な直列結合を形成します。
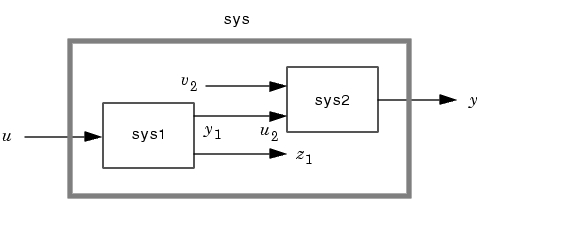
インデックスベクトルoutputs1、および、inputs2は、sys1のどの出力 と
とsys2 のどの入力 とを結合するかを示します。結果として得られるモデル
とを結合するかを示します。結果として得られるモデルsysは、入力として 、出力として
、出力として をもっています。
をもっています。
例題
5入力と4出力をもつ状態空間システムsys1、および、2入力、3出力をもつ、もう1つのシステムsys2を考えます。sys1の出力2と4をsys2の入力1と2に結合することによって、2つのシステムを直列に結合します。
outputs1 = [2 4]; inputs2 = [1 2]; sys = series(sys1,sys2,outputs2,inputs1)
参考
append LTIシステムの付加
feedback フィードバック結合
parallel 並列結合
| | rmodel, rss | set | |