

| Control System Toolbox関数リファレンス | |
入力および出力を付加することによって、LTIモデルのグループ化
表示
sys = append(sys1,sys2,...,sysN)
詳細
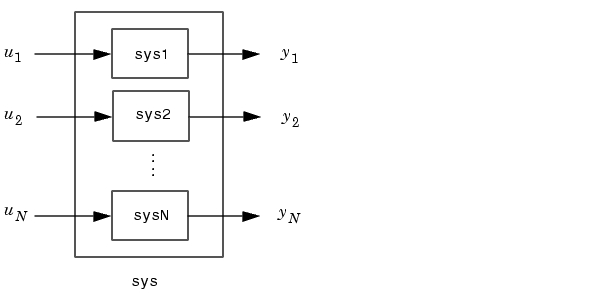
append
は、LTIモデルsys1,...,sysNの入力および出力を付加して、下図のような拡大モデルを作成します。
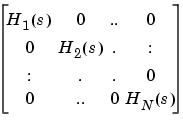
伝達関数  ,...,
,..., をもつシステムの場合、結果として得られるシステム
をもつシステムの場合、結果として得られるシステムsysは、つぎのようなブロック対角化伝達関数になります。
データ および
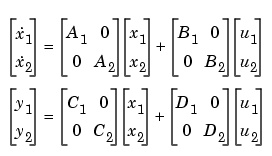
および の状態空間モデル
の状態空間モデルsys1およびsys2に対して、append(sys1,sys2)は、つぎの状態空間モデルを作成します。
引数
入力引数sys1,..., sysNは、任意のタイプのLTIモデルを使うことができます。正則行列を静的ゲインの表現として使うことができますが、入力引数には少なくとも1つのLTIオブジェクトがなければなりません。LTI モデルは、すべてが連続か、または、すべてが同じサンプル時間をもつ離散かのいずれかでなければなりません。異なるタイプのモデルを付加する場合、結果として得られるタイプは、優先ルール(詳細については、マニュアルの"設定"を参照)によって決まります。
例題
sys1 = tf(1,[1 0]) sys2 = ss(1,2,3,4) sys = append(sys1,10,sys2)
sys
a =
x1 x2
x1 0 0
x2 0 1.00000
b =
u1 u2 u3
x1 1.00000 0 0
x2 0 0 2.00000
c =
x1 x2
y1 1.00000 0
y2 0 0
y3 0 3.00000
d =
u1 u2 u3
y1 0 0 0
y2 0 10.00000 0
y3 0 0 4.00000
Continuous-time system.
参考
connect ブロック線図結合によるモデル化
feedback フィードバック結合
parallel 並列結合
series 直列結合
| | acker | augstate | |