

| Control System Toolbox関数リファレンス | |
表示
sysd = c2d(sys,Ts)
sysd = c2d(sys,Ts,method)
詳細
sysd = c2d(sys,Ts)は、入力にゼロ次ホールドとTs秒のサンプル時間を使って、連続系LTIモデルsysを離散化します。
sysd = c2d(sys,Ts,method)は、変更できる種々の離散化手法を設定します。文字列methodは、つぎの中から離散化手法を選択します。
これらの離散化手法に関する詳細については、3章の"LTIモデルの連続/離散変換"を参照してください。
c2dは、MIMOシステム('matched'方法を除き)、および、むだ時間入力をもつLTIモデル('zoh'、および、'foh'方法のみ)をサポートします。
例題
サンプル時間 秒で、三角近似を使って、このシステムを離散化するには、つぎのように入力します。
秒で、三角近似を使って、このシステムを離散化するには、つぎのように入力します。
H = tf([1 -1],[1 4 5],'inputdelay',0.35)
Transfer function:
s - 1
exp(-0.35*s) * -------------
s^2 + 4 s + 5
Hd = c2d(H,0.1,'foh')
MATLABは、つぎの出力を行ないます。
0.0115 z^3 + 0.0456 z^2 - 0.0562 z - 0.009104
---------------------------------------------
z^6 - 1.629 z^5 + 0.6703 z^4
Sampling time: 0.1
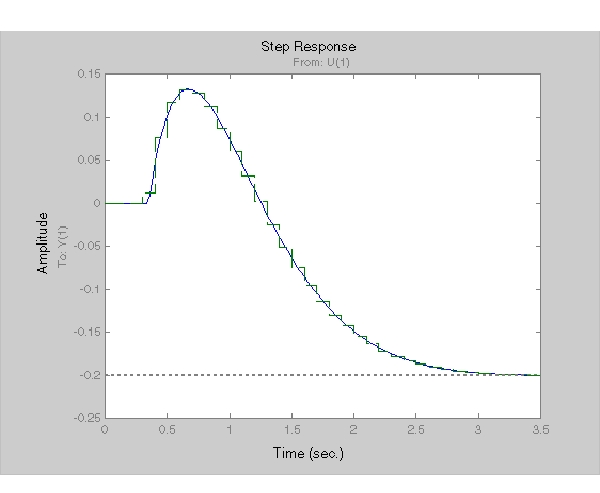
つぎのコマンドにより、連続系と離散系のステップ応答を比較します。
step(H,'-',Hd,'--')
参考
d2c 離散系から連続系への変換
d2d 離散システムのリサンプリング
参考文献
[1] Franklin, G.F., J.D. Powell, and M.L. Workman, Digital Control of Dynamic Systems, Second Edition, Addison-Wesley, 1990.
| | bode | canon | |
 秒をもつ、つぎのシステムを考えます。
秒をもつ、つぎのシステムを考えます。