

| Control System Toolbox関数リファレンス | |
表示
csys = canon(sys,'type') [csys,T] = canon(sys,'type')
詳細
canonは、連続系または離散系 LTIシステムsysに対して、正準型状態空間モデルを計算します。2種類の正準型をサポートしています。
Modal型
csys = canon(sys,'modal')は、modal型での実現csysを出力します。ここでは、実数固有値は行列 の対角上に現われ、複素共役固有値は
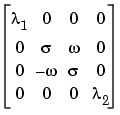
の対角上に現われ、複素共役固有値は の対角上に2×2ブロックで表示されます。固有値
の対角上に2×2ブロックで表示されます。固有値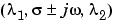 をもつシステムの場合、modal型の行列は、つぎのような形式になっています。
をもつシステムの場合、modal型の行列は、つぎのような形式になっています。
コンパニオン型
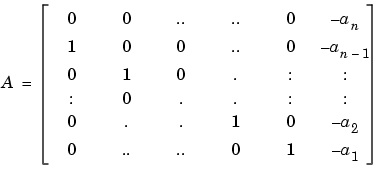
csys = canon(sys,'companion')は、sysのコンパニオン実現を出力します。ここでは、システムの特性多項式は、行列 の右端の列に明示的に表示されます。つぎの特性多項式をもつシステムの場合、
の右端の列に明示的に表示されます。つぎの特性多項式をもつシステムの場合、

対応するコンパニオン 行列は、つぎのような形式になっています。
行列は、つぎのような形式になっています。
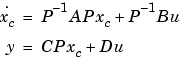
[csys,T] = canon(a,b,c,d,'type')
も、オリジナルの状態ベクトル と正準型状態ベクトル
と正準型状態ベクトル を、つぎのように関連付ける状態座標変換
を、つぎのように関連付ける状態座標変換Tを出力します。

この構文は、sysが状態空間モデルでない場合、T=[]を出力します。
アルゴリズム
伝達関数または零点-極-ゲインモデルは、ssを使って、まず状態空間型に変換されます。
Modal型への変換では、行列 の固有ベクトル
の固有ベクトル からなる行列を使用します。それを使って、modal型は、
からなる行列を使用します。それを使って、modal型は、
コンパニオン型への変換では、可制御性行列を基に状態相似変換を使用します[1]。
制限
Modal変換では、行列 が対角化可能でなければなりません。対角化が可能である十分条件は、
が対角化可能でなければなりません。対角化が可能である十分条件は、 に重複する固有値がないということです。
に重複する固有値がないということです。
コンパニオン変換では、システムが第1入力から可制御でなければなりません。コンパニオン型は、ほとんどの状態空間型での計算に対して、条件数が悪くなる場合があります。従って、コンパニオン型変換の使用は、できるだけ避けてください。
参考
ctrb 可制御性行列
ctrbf 可制御正準型
ss2ss 状態相似変換
参考文献
[1] Kailath, T. Linear Systems, Prentice-Hall, 1980.
| | c2d | care | |
 は、
は、 の逆行列です。
の逆行列です。