

| モデルの作成と取り扱い | |
状態空間モデル
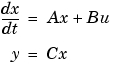
状態空間モデルは、システムダイナミクスを記述するための線形微分または差分方程式に依存します。連続時間モデルは、つぎの形式をしています。
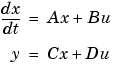
ここで、xは状態ベクトルであり、u, yは入力および出力ベクトルです。そのようなモデルは、物理方程式、あるいは状態空間同定から生じるか、伝達関数システムの状態空間実現によって生じます。
sys = ss(A,B,C,D)
Aは、Nx行Nx 列の実数値行列Bは、Nx行Nu列の実数値行列Cは、Ny行Nx列の実数値行列Dは、Ny行Nu列の実数値行列これにより状態空間行列A、B、C、DをストアするSSオブジェクトsysが作成されます。ゼロのD行列をもったモデルに対して、整合性のある次元をもったゼロ行列の省略形として、D = 0を使うことができます。
実例として、つぎの電気モータの単純なモデルについて考えます。
入力電流 および角速度
および角速度 の関係は、つぎの状態空間方程式によって記述されます。
の関係は、つぎの状態空間方程式によって記述されます。

sys = ss([0 1;-5 -2],[0;3],[0 1],0)
a =
x1 x2
x1 0 1.00000
x2 -5.00000 -2.00000
b =
u1
x1 0
x2 3.00000
c =
x1 x2
y1 0 1.00000
d =
u1
y1 0
A、B、C、D行列に加えて、状態空間モデルの表示は、状態名、入力名、出力名を含むことができます。デフォルト名(ここでは、x1、x2、u1、y1)は、それらが定義されていない場合に使われます。状態名、入力名、出力名の設定法の詳細は、"LTIプロパティ"を参照してください。
| | 零点/極/ゲインモデル | ディスクリプタ状態空間モデル | |
 はロータの角変位であり、
はロータの角変位であり、 は駆動電流です。
は駆動電流です。