| Getting Started | |
周波数応答設計
最新の設計は、SISO設計ツールの根軌跡に関するものです。他の方法は、開ループのBode線図をベースにした、極配置を含む周波数応答設計に関するものです。これらの手法を説明するために、つぎの例題として、電気水圧型サーボメカニズムに関するものです。
例題:電気水圧型サーボメカニズム
電気水圧型サーボメカニズムモータの簡単なものは、つぎのようなものです。
スプールに加える力は、電磁気コイルに流れる電流に比例します。スプールが移動するにつれ、バルブがオープンし、高圧の流体がチャンバーに流れます。移動する流体は、スプールの反対方向に、ピストンを移動します。参考文献[1]は、電気水力増幅器、バブルのスプール、ピストンに関する線形化されたモデルを示しています。また、このタイプのサーボメカニズムの詳細も記述しています。
ピストンコントロールに、このようなサーボメカニズムを使用する場合、ピストンの位置を制御するために、電磁石への入力電圧を使います。ピストンの位置の測定が使用可能な場合、ピストンの位置の制御にフィードバックを使用することができます。
フィードバック構造つぎの項増を使って、電気水力を使ったバブルの位置に関する閉ループモデルを設定できます。
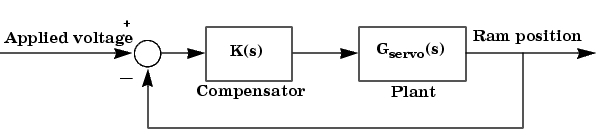
図 4-1:電気水力を使ったサーボメカニズムに関するフィードバック制御構造
K(s)は、設計する補償器を示します。この補償器は、ゲインまたはより一般的なLTIシステムのいずれかです。
プラント伝達関数load ltiexamples
と入力して、電気水力を使った位置制御メカニズム用の線形化されたプラントの伝達関数であるGservoを含んだ線形モデルをロードします。MATLABプロンプトのもとで、Gservoと入力すると、電気水力を使った(プラント)伝達関数が表示されます。
Zero/pole/gain from input "Voltage" to output "Ram position":
40000000
-----------------------------
s (s+250) (s^2 + 40s + 9e004)
設計仕様
この例題では、閉ループシステムのStep応答が、つぎの仕様を満足するコントローラを設計します。
この節の残りの部分は、SISO設計ツールを使って、これらの仕様を満足するコントローラを設計することを議論します。
モデルのインポートSISO設計ツールをオープンして、MATLABのプロンプトで、つぎのように入力します。
sisotool(Gservo)
これにより、インポートされたサーボメカニズムプラントをもつSISO設計ツールがオープンします。
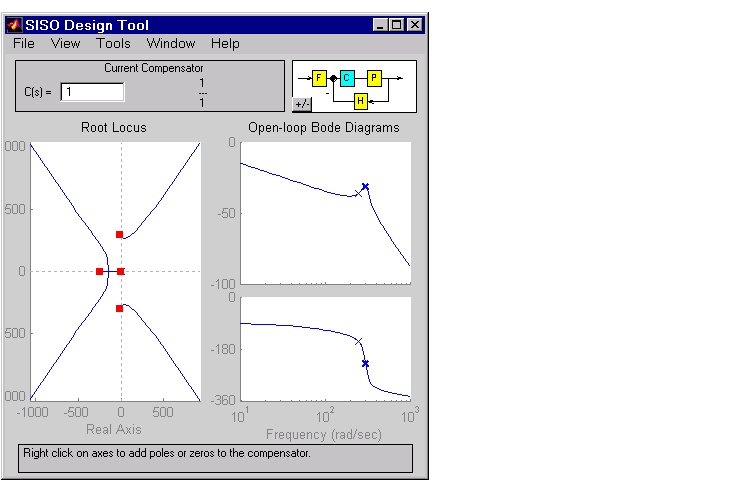
図 4-2:SISO設計ツールは、電気水力を使ったサーボメカニズムプラントの根軌跡とBode線図を示します。
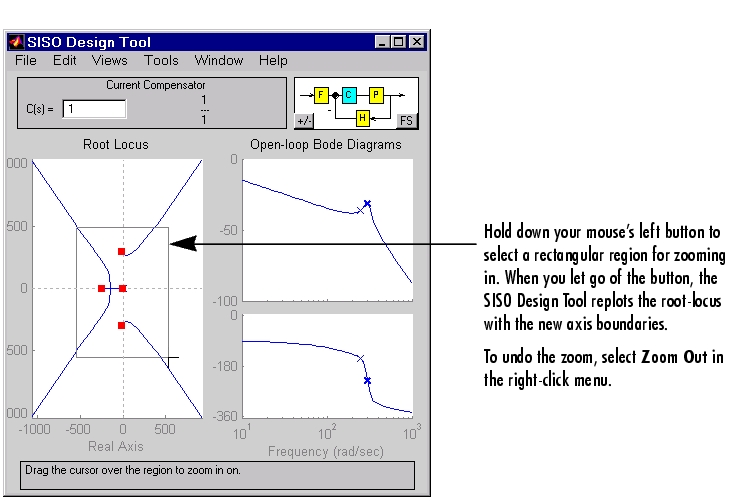
ズーミング根軌跡の中で右クリックメニューを使って、ズーム(Zoom)のX-Yを選択します。マウスの左ボタンをホールドしたまま、ドラッグして、ズーミングエリアを選択します。この例題では、根軌跡の領域をX-軸とY-軸共に約-500から500とします。つぎの図は、プロセスの中でのズームを示しています。
DCモータの例題のように、ツール(Tools)メニューのループ応答(Loop Responses)を選択して、LTI Viewerをオープンします。右クリックメニューを使って、閉ループシステムのStep応答を表示するように、LTI Viewerを作り直します。現在、2つのウィンドウ、SISO設計ツールとそれに関連したLTI Viewerを表示しています。
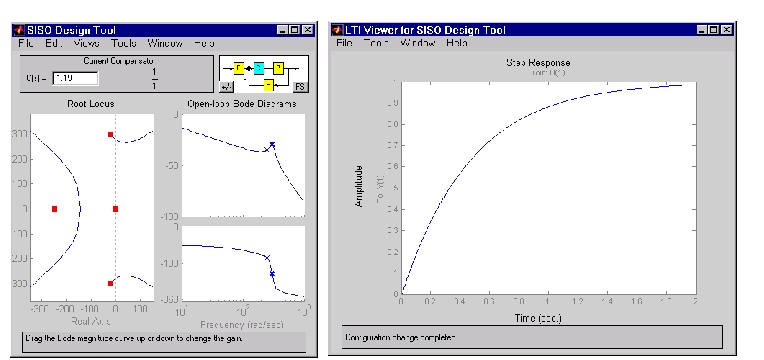
図 4-4:電気水力用のサーボメカニズムのSISO設計ツールと関連したLTI Viewer
Step応答図は、立ち上がり時間が2秒のオーダで、設定したシステムの仕様と比べて非常に遅いことを示しています。つぎの節では、SISO設計ツールで、"設計仕様"で設定した仕様を満足する補償器を設計するために、周波数設計手法の使い方を示します。
Bode線図で示す応答をドラッグして、ゲインセットポイントを変更
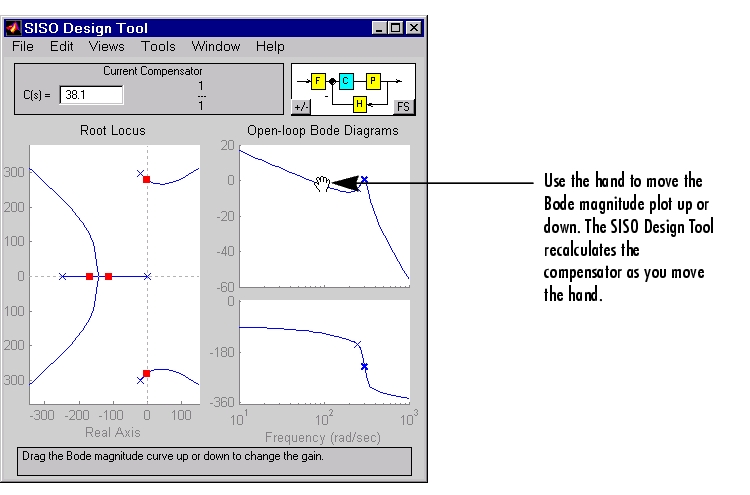
ゲインセットポイントは、閉ループ極を決定するため、補償器に適用するゲイン値です。この値は、GUIのC(s)テキストボックスに表れるものです。複素平面の左半面の閉ループ極を保持したまま、ゲインを増加(減少)すると、
図 4-5:Bode線図のゲイン応答をドラッグして、補償器のゲインを変更
終了すると、新しい補償器のゲインは、約38になりました。この値で、サーボメカニズムの極の虚部は、虚軸と非常に近くなり、システムが非常に不安定状態になっていることを示しています。つぎの二つの図は、SISO設計ツールとこの状態でのStep応答を示しています。
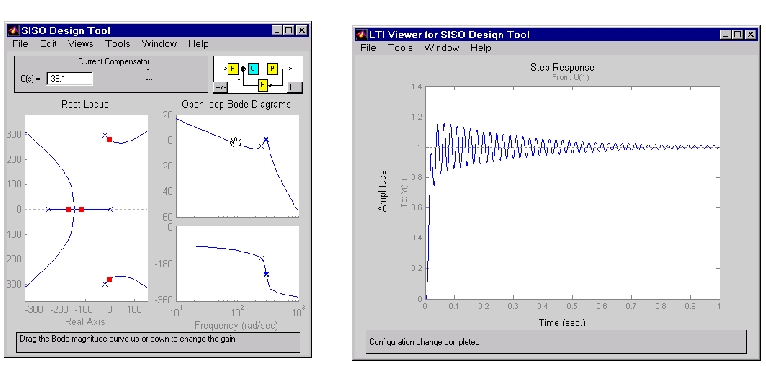
図 4-6:Bode線図を上方向にドラッグして、ゲインを増加させ、極の虚部が共に虚軸に近付いています。
この図が示すように、電気水力サーボメカニズムのStep応答は、非常に速く、減衰の小さいものです。
システム応答の表示
この例題に対して、Step応答は、設計規範を満足しています。ゲインセットポイントの現在の値は約38.1です。ゲインのこの値は、システムの安定の限界を調べます。ゲインに対する妥当な値(いわゆる、20)を選択し、Step応答を調べてみましょう。
ゲイン(Gain)のテキストボックスを編集することにより、ゲインを20に変更し、入力(Enter)キーを押します。根軌跡の閉ループ極の位置は、新しいゲインセットポイントで再計算されていることに注意してください。
つぎの図は、ゲイン20に関連したStep応答を示しています。
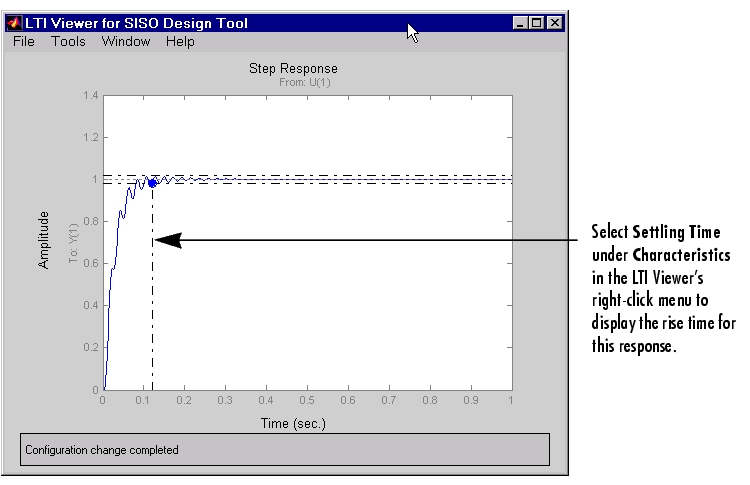
図 4-7:C(s) = 20に対する整定時間をもつStep応答
この閉ループ応答は、仕様の整定時間(0.05秒以下)を満足していません。つぎの節では、この仕様を満足する補償器の設計法を示します。
仕様を満足する補償器の設計
現在の閉ループシステムは、必要な設計仕様を2つ満足していません。まず、ゲインを約33に増加してみましょう。LTI Viewerは、つぎのようになります。
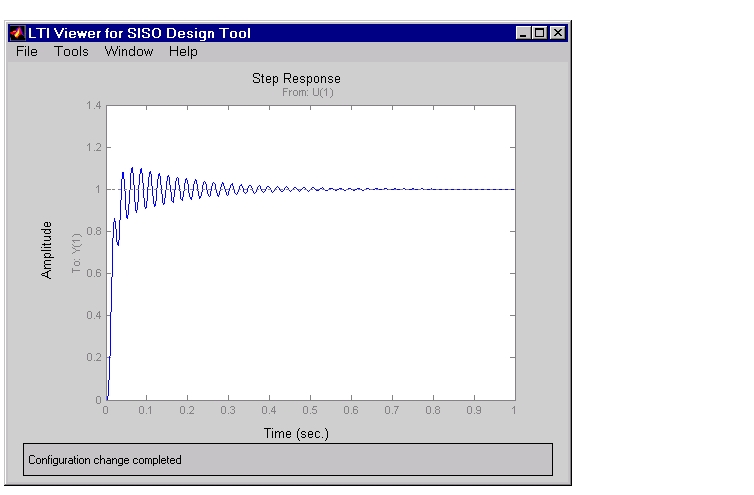
ご存知のように、ゲインを増加するに連れ、応答時間は減少し、逆に、オーバシュートは増加します。ここで、結果は、オーバシュートの仕様を満足していません。ここで使用したゲインは、すでにかなり大きい値を設定しているので、この設計法で、補償器に対するゲインのみを使って、二つの設計仕様を満足することはできないように思えます。つぎの節では、極と零点を付加して、よりダイナミックな補償器を作成する方法を示します。
極と零点を補償器に付加
補償器を設定するために、3つのパラメータ、極、零点、ゲインが存在します。ゲインを選択していると、極または零点を補償器に付加することができます。
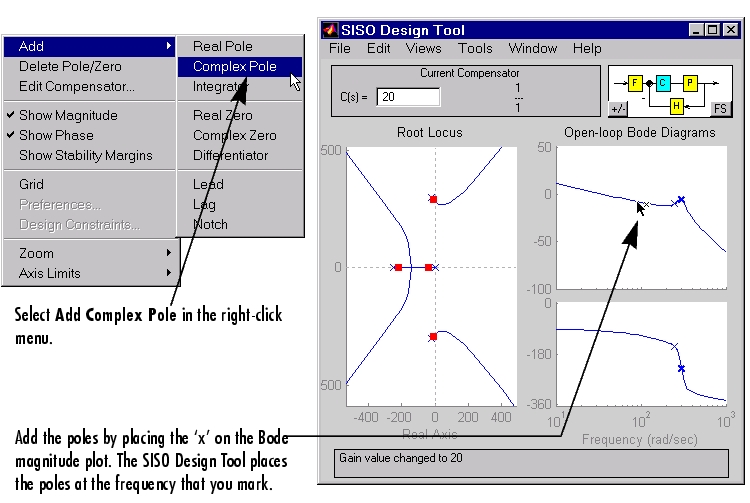
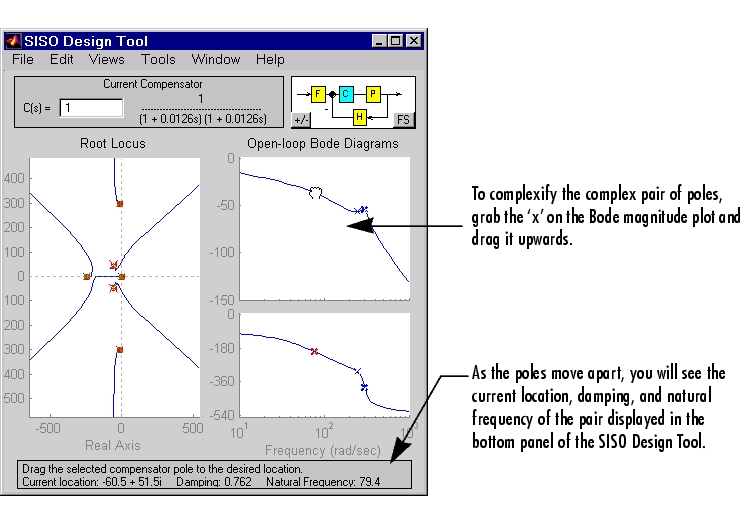
補償器の中のゲインのみを使って、設計仕様を満足させることはできません。それで、Bode線図のゲイン応答上に複素共役の補償器の極を付加することを考えましょう。
Bode線図のゲイン応答のピーク値の左の適当な位置に'x'を配置します。この共役極を付加すると、LTI Viewerの応答図は変更され、根軌跡とBode線図は共に新しい極を示します。つぎの図は、新しい極を加えたSISO設計ツールを示しています。
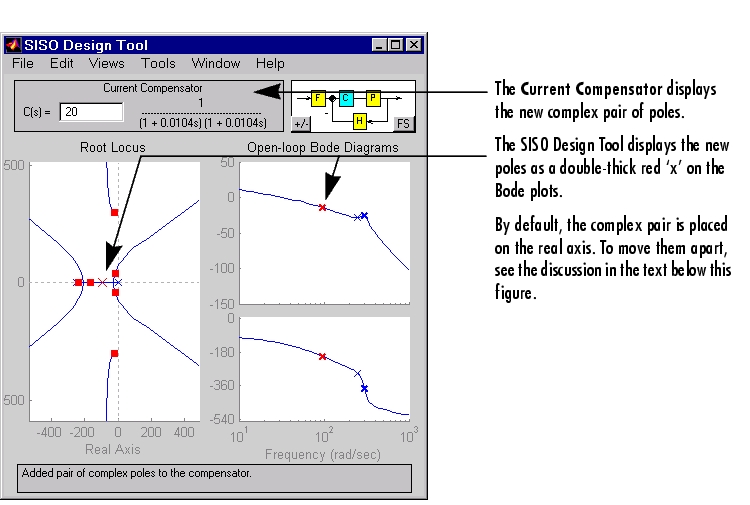
デフォルトでは、Bode線図のゲイン応答図に複素共役極(または、零点)を付加する場合、SISO設計ツールは、実軸上で選択した周波数で共役極(または、零)を配置します。極が複雑になるので、Bode線図のゲイン応答上で、赤の'x'をクリックし、図に示すように極をドラッグします。
補償器に複素共役零点を付加する手順も全く同じです。補償器に付加した複素共役の閉ループ極の左側に複素共役零点を付加して見ましょう。
Step応答が不安定な場合、ゲインは、より低くなります。この例題では、結果のStep応答は安定ですが、設計規範をまだ満たしてはいません。
ご存知のように、補償器の設計過程はトライアンドエラーを繰り返すものです。ユーザは、補償器の極や補償器の零点、閉ループの極を設計規範を満たすまで、根軌跡の回りでドラッグすることができます。
つぎの節では、数値を設定することで、極や零点の配置方法を示します。サーボメカニズムの例題に対しても、設計仕様を満たす解が存在します。
補償器の極と零点の位置の編集
極や零点を変更する簡単な方法は、マウスを付加ってそれらを掴み(処理対象にし)、Bode線図のゲイン応答図上で移動することです。正確な数値を設定した場合、補償器の編集(Edit Compensator)を使って、ゲイン値や補償器の極や零点の位置を変更できます。
SISO設計ツールから補償器の編集(Edit Compensator)ウィンドウをオープンするには、3つの方法があります。
いずれの方法を選択しても、つぎのウィンドウがオープンします。

図 4-12:補償器の編集ウィンドウを使って、補償器の極、零点の付加や削除
補償器の編集(Edit Compensator)ウィンドウを使って、つぎの事柄が可能になります。
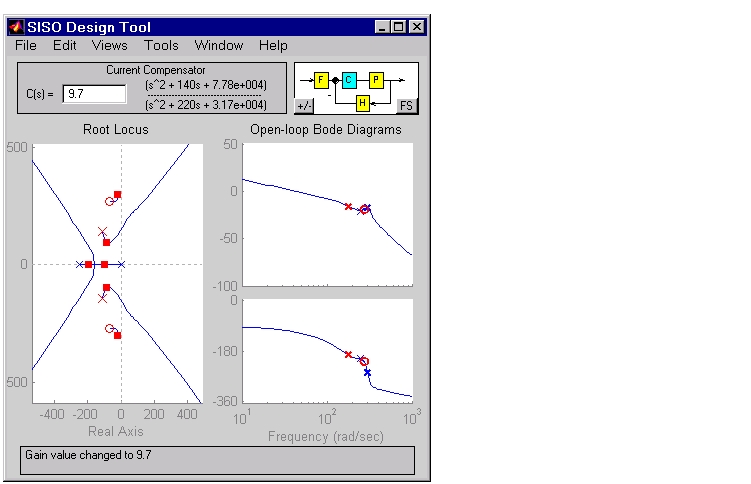
この例題で、極を に、零点を
 に付加し、補償器のゲインを9.7にします。
に付加し、補償器のゲインを9.7にします。
図 4-13:電気水力サーボメカニズムの設計例題の最終値を使ったSISO設計ツール
この設計が、4-13ページで設定した設計仕様を満足しているか否かを調べるために、LTI Viewerの中の閉ループシステムのStep応答を調べてみましょう。
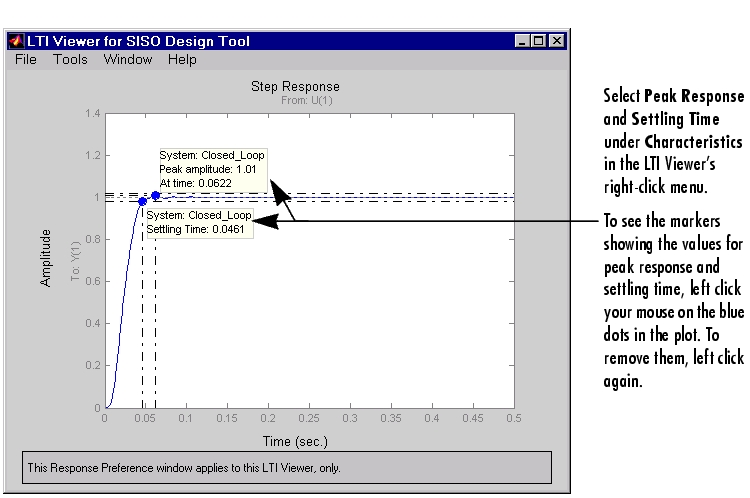
図 4-14:電気水力サーボメカニズムの例題の最終的に設計したシステムの閉ループStep応答
Step応答は満足しているように思えます。整定時間は0.05秒以下で、オーバシュートは5パーセント以下です。従って、設定仕様は満足され、設計過程を終了します。
分子または分母が、カレント補償器(Current Compensator)フィールドで非常に大きい値になっている場合は常に、デフォルトのpnumKとdenKが表示されます。実際の分子や分母を表示するには、SISO設計ツールをリサイズしてください。
| | 根軌跡の設計 | 補償器とモデルの保存 | |