

| Getting Started | |
LTI配列
線形、時不変モデルの多次元配列を作成でき、それを単一要素として取り扱うことができます。たとえば、DCモータに対して、K1パラメータを変更し、結果の状態空間モデルを保存したい場合、つぎのコードを使います。
K1_1 = 0.1; K1_2 = 0.15; K1_3 = 0.2; % K1用の値 A1 = [-(R + K2)/L 0; K1_1/J -Kf/J]; A2 = [-(R + K2)/L 0; K1_2/J -Kf/J]; A3 = [-(R + K2)/L 0; K1_3/J -Kf/J]; sys_lti(:,:,1)= ss(A1,B,C,D); sys_lti(:,:,2)= ss(A2,B,C,D); sys_lti(:,:,3)= ss(A3,B,C,D);
入力数と出力数は、LTI配列で表されたすべての線形モデルで同じ数でなければなりません。しかし、希望するならば、LTI配列の中で、モデル毎に状態数を変更することができます。
LTI配列sys_ltiは、例題の中で3つの状態空間システムをもっています。
Model sys_lti(:,:,1,1)
======================
a =
x1 x2
x1 -4.03 0
x2 10 -10
.
.
.
Model sys_lti(:,:,2,1)
======================
.
.
.
Model sys_lti(:,:,2,1)
======================
.
.
.
3x1 array of continuous-time state-space models.
Control System Toolboxの中の他のオブジェクトと同じように、LTI配列として取り扱うこともできます。たとえば、
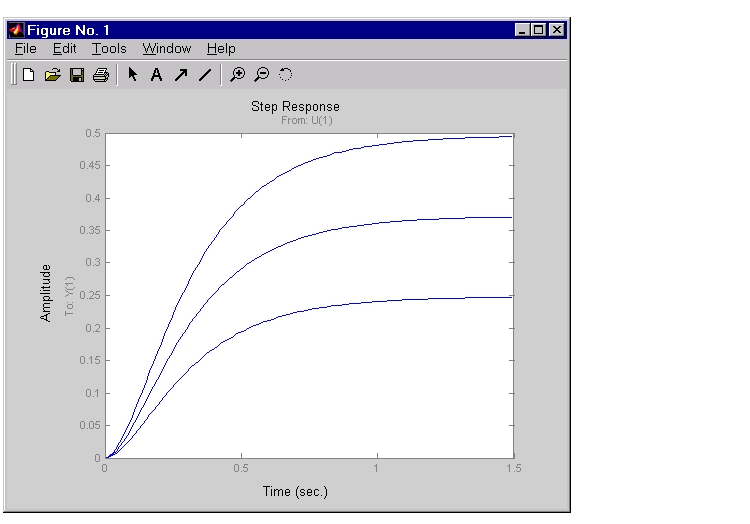
step(sys_lti)
は、すべての3つの状態空間モデルのステップ応答図を作成しましょう。
LTI配列は、モデル全体について、バッチ処理するときに有効なものです。この詳細は、複数モデルの取り扱いを参照してください。
| | MIMOシステムの中のI/Oのペアへのアクセスと取り扱い | モデルの特性 | |