

| 設計ケーススタディ | |
時変Kalmanフィルタ
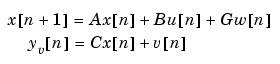
時変Kalmanフィルタは、時変システム、または非定常ノイズ共分散をもつLTIシステムに対して定常状態フィルタを一般化したものです。つぎの状態方程式および出力方程式が与えられた場合、
ここで、 および
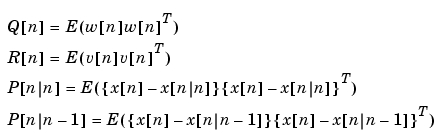
および は、1-51ページで定義されているとおりであり、つぎの表記を伴います。
は、1-51ページで定義されているとおりであり、つぎの表記を伴います。
簡略にするために、状態空間行列の時間依存性を示すサブスクリプトを省略しました。
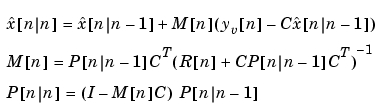
初期条件を 、
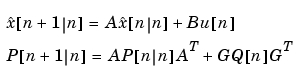
、 とすると、これらの方程式を反復してフィルタ処理を実行することができます。時間サンプルごとに状態推定値
とすると、これらの方程式を反復してフィルタ処理を実行することができます。時間サンプルごとに状態推定値 と誤差共分散行列
と誤差共分散行列 のいずれをも更新しなければならないことに注意してください。
のいずれをも更新しなければならないことに注意してください。
| | 定常状態の設計 | 時変設計 | |