

| 設計ケーススタディ | |
時変設計
Control System Toolboxは、時変Kalmanフィルタ処理を実行するための特定のコマンドは提供しませんが、MATLABでリカーシブフィルタを実行するのは容易です。この節では、上で検討した定常プラントに対して、これを実行する方法について説明します。
% 上で生成したプロセスノイズwと観測ノイズvを使用 sys = ss(A,B,C,0,-1); y = lsim(sys,u+w); % w = プロセスノイズ yv = + v; % v = 観測ノイズ

つぎのforループをもつ時変フィルタを実行することができます。
P = B*Q*B'; % 初期誤差共分散 x = zeros(3,1); % 状態に対する初期条件 ye = zeros(length(t),1); ycov = zeros(length(t),1); for i=1:length(t) % 観測値の更新 Mn = P*C'/(C*P*C'+R); x = x + Mn*(yv(i)-C*x); % x[n|n] P = (eye(3)-Mn*C)*P; % P[n|n] ye(i) = C*x; errcov(i) = C*P*C'; % 時刻の更新 x = A*x + B*u(i); % x[n+1|n] P = A*P*A' + B*Q*B'; % P[n+1|n] end
ここで、真の出力と推定出力をグラフ上で比較することができます。
subplot(211), plot(t,y,'--',t,ye,'-') subplot(212), plot(t,y-yv,'-.',t,y-ye,'-')
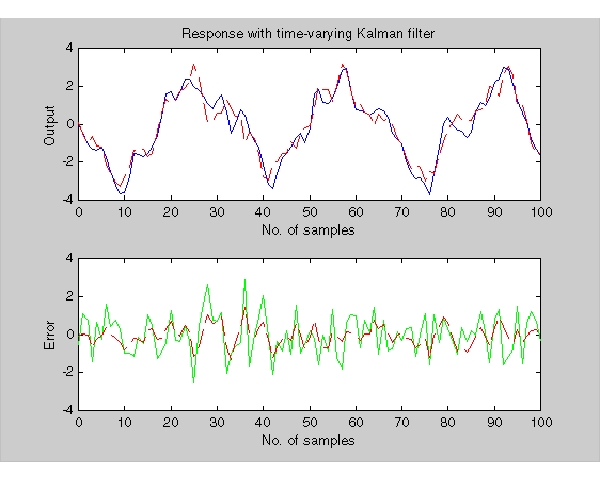
最初のプロットは、真の応答 (破線)とフィルタを適用した応答
(破線)とフィルタを適用した応答 (実線)を示しています。第2のプロットは、測定誤差(鎖線と点)と推定誤差(実線)を比較しています。
(実線)を示しています。第2のプロットは、測定誤差(鎖線と点)と推定誤差(実線)を比較しています。
時変フィルタは、サンプルごとの推定誤差 の共分散
の共分散errcovも推定します。それをプロットして、フィルタが(定常入力ノイズで期待されるとおりに)定常状態に達したかどうかを確認します。
subplot(211)
plot(t,errcov), ylabel('Error covar')
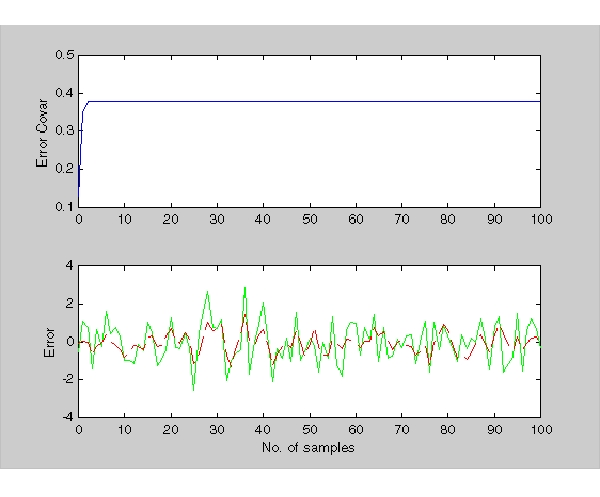
この共分散プロットから、出力共分散がおよそ5つのサンプルで実際に定常状態に達したことを確認できます。それ以降、時変フィルタは定常状態バージョンと同じ性能を維持します。
EstErr = y-ye; EstErrCov = sum(EstErr.*EstErr)/length(EstErr)MATLABは、つぎの出力を行います。
EstErrCov =
0.2718
この値は、理論値errcovより小さく、定常状態設計に対して得られる値に近くなります。
最後に、最終値 とイノベーションゲイン行列の定常状態値
とイノベーションゲイン行列の定常状態値 が、つぎのように一致することに注意してください。
が、つぎのように一致することに注意してください。
Mn, M
Mn =
0.3798
0.0817
-0.2570
M =
0.3798
0.0817
-0.2570
| | 時変Kalmanフィルタ | 参考文献 | |