

| 設計ケーススタディ | |
離散Kalmanフィルタ
この問題に対する定常状態Kalmanフィルタの方程式は、つぎのとおりです。


 は、
は、 までの過去の観測量からの
までの過去の観測量からの の推定値です。
の推定値です。  は、最新の観測量
は、最新の観測量 に基づいて、更新した推定値です。
に基づいて、更新した推定値です。現在の推定値を とすると、時間の更新値は、つぎのサンプル
とすると、時間の更新値は、つぎのサンプル (1段階先の予測子)での状態値を予測します。更新した観測値は、新しい観測値
(1段階先の予測子)での状態値を予測します。更新した観測値は、新しい観測値 を基に、この予測を調整します。修正項は、イノベーション、すなわち、つぎのような
を基に、この予測を調整します。修正項は、イノベーション、すなわち、つぎのような の観測値と予測値との間の誤差の関数です。
の観測値と予測値との間の誤差の関数です。

イノベーションゲイン は、ノイズ共分散に対する推定誤差の定常状態共分散を最小にするように選択します。
は、ノイズ共分散に対する推定誤差の定常状態共分散を最小にするように選択します。

時刻および観測値更新方程式を組み合わせて、1つの状態空間モデル(Kalman フィルタ)にすることができます。
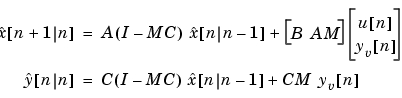
このフィルタにより、 の最適推定値
の最適推定値 が生成されます。フィルタの状態は、
が生成されます。フィルタの状態は、 であることに注意してください。
であることに注意してください。
| | Kalmanフィルタ処理 | 定常状態の設計 | |