| 設計ケーススタディ | |
軸同士の相互干渉
 /
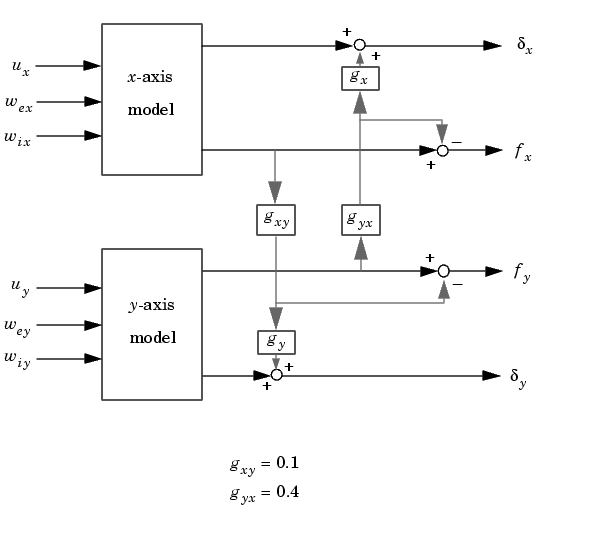
/ の厚さのレギュレーションは、本質的にMIMO問題に属します。これまで各軸を独立して扱い、一度に1つのSISOループを閉じました。この設計は、2つの軸が、全く切り離されている場合に限り有効です。あいにく、圧延機プロセスには、軸間にある程度の相互干渉が見られます。物理的に、
の厚さのレギュレーションは、本質的にMIMO問題に属します。これまで各軸を独立して扱い、一度に1つのSISOループを閉じました。この設計は、2つの軸が、全く切り離されている場合に限り有効です。あいにく、圧延機プロセスには、軸間にある程度の相互干渉が見られます。物理的に、 -軸上の油圧力の増加により材料は圧縮され、それによって、
-軸上の油圧力の増加により材料は圧縮され、それによって、 -軸シリンダ上の反発力が増加します。その結果、-軸方向の厚さが増加し、その分、-軸上の油圧力が(相対的に)減少します。
-軸シリンダ上の反発力が増加します。その結果、-軸方向の厚さが増加し、その分、-軸上の油圧力が(相対的に)減少します。
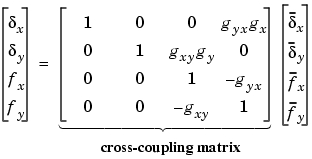
従って、厚さのギャップと圧延力は、つぎの行列により、 -軸と
-軸と -軸モデルの出力
-軸モデルの出力 に関連します。
に関連します。
相互干渉を考慮した場合、前の分離したLQG設計が、どのようになるかを見てみます。図1-2に示す2軸モデルを作成するために、 -軸、
-軸、 -軸に対するモデル
-軸に対するモデルPx、Pyを並べます。
P = append(Px,Py)
便宜上、入力と出力を並べ替えて指令値と厚さギャップが最初になるようにします。
P = P([1 3 2 4],[1 4 2 3 5 6])
P.outputname
ans =
'x-gap'
'y-gap'
'x-force'
'y-force'
gxy = 0.1; gyx = 0.4; CCmat = [eye(2) [0 gyx*gx;gxy*gy 0] ; zeros(2) [1 -gyx;-gxy 1]] Pc = CCmat * P Pc.outputname = P.outputname
また、閉ループ応答をシミュレーションするために、以下のように閉ループモデルを作成します。
feedin = 1:2 % Pc の最初の2 つの入力は指令値 feedout = 3:4 % Pc の最後の2 つの出力は観測値 cl = feedback(Pc,append(Regx,Regy),feedin,feedout,+1)
これで、励起白色ノイズwx( -軸に対して)と
-軸に対して)とwy( -軸に対して)に対する開ループ応答と閉ループ応答とをシミュレーションする準備ができました。
-軸に対して)に対する開ループ応答と閉ループ応答とをシミュレーションする準備ができました。
wxy = [wx ; wy] lsim(Pc(1:2,3:6),':',cl(1:2,3:6),'-',wxy,t)
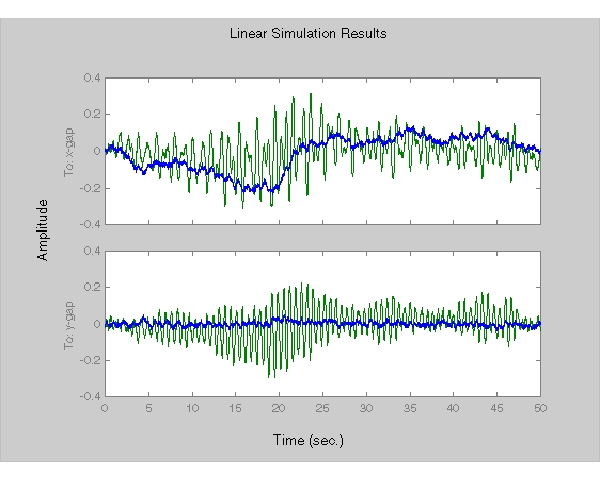
応答は、 -軸上のレギュレーション性能の重大な劣化を示しています(ピークの厚さの変動は、相互干渉なしのシミュレーションより、約4倍大きくなっています)。したがって、それぞれに1つのループで設計することは、このレベルの相互干渉には不適切であり、干渉の影響に対処するためには軸を連成させたMIMO設計を実行する必要があります。
-軸上のレギュレーション性能の重大な劣化を示しています(ピークの厚さの変動は、相互干渉なしのシミュレーションより、約4倍大きくなっています)。したがって、それぞれに1つのループで設計することは、このレベルの相互干渉には不適切であり、干渉の影響に対処するためには軸を連成させたMIMO設計を実行する必要があります。
| | y軸に対するLQG設計 | MIMO LQG設計 | |