

| 設計ケーススタディ | |
MIMO LQG設計
導いた完全な2軸状態空間モデルPcから開始します。モデルの入力、出力は、つぎのとおりです。
Pc.inputname
ans =
'u-x'
'u-y'
'w-ex'
'w-ix'
'w_ey'
'w_iy'
P.outputname
ans =
'x-gap'
'y-gap'
'x-force'
'y-force'
前と同様、'x-gap'と'y-gap'の出力に直列にローパスフィルタを結合し、低周波数の厚さ変動のみを抑制します。
Pdes = append(lpf,lpf,eye(2)) * Pc Pdes.outputn = Pc.outputn
つぎに、前と同様、LQゲインと状態推定器を設計します(ここには、2つの指令値と2つの観測値があります)。
k = lqry(Pdes(1:2,1:2),eye(2),1e-4*eye(2)) % LQゲイン est = kalman(Pdes(3:4,:),eye(4),1e3*eye(2)) % Kalman推定器 RegMIMO = lqgreg(est,k) % MIMO LQGレギュレータを作成
結果として得られるLQGレギュレータRegMIMOには、2つの入力と2つの出力があります。
RegMIMO.inputname
ans =
'x-force'
'y-force'
RegMIMO.outputname
ans =
'u-x'
'u-y'
sigma(RegMIMO)
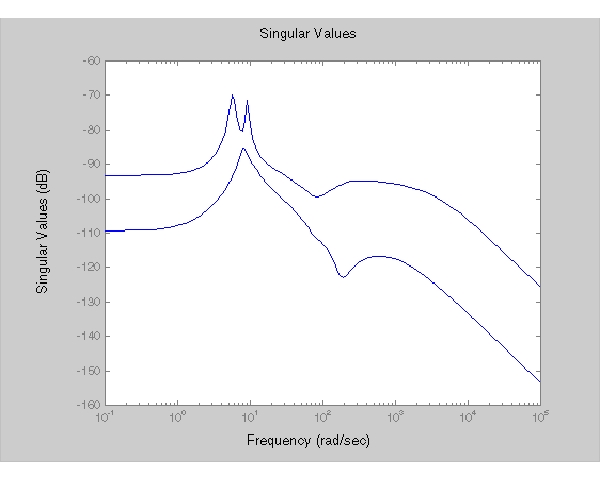
つぎに、(フィードバックに対するMIMO LQGレギュレータを用いて)白色ノイズ入力に対する開ループ時間応答と閉ループ時間応答をプロットします。
% 閉ループモデルを作成 cl = feedback(Pc,RegMIMO,1:2,3:4,+1); % 同じノイズ入力を用いたLSIM でのシミュレーション lsim(Pc(1:2,3:6),':',cl(1:2,3:6),'-',wxy,t)
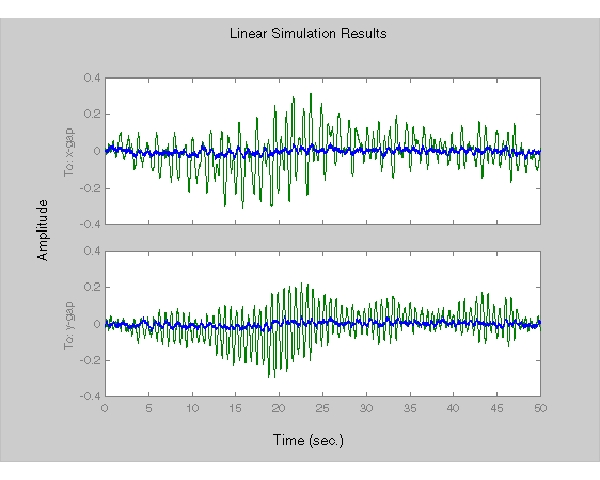
MIMO設計は、各軸に対する独立のSISO設計より明らかに改良されています。特に、 /
/ 軸の厚さ変動のレベルは、分離したケースで得られるレベルに匹敵するものです。この例題は、多変数システムに対するMIMO設計の利点を示しています。
軸の厚さ変動のレベルは、分離したケースで得られるレベルに匹敵するものです。この例題は、多変数システムに対するMIMO設計の利点を示しています。
| | 軸同士の相互干渉 | Kalmanフィルタ処理 | |