

| 設計ケーススタディ | |
y軸に対するLQG設計
 -軸に対するLQG設計(
-軸に対するLQG設計( の厚さのレギュレーション)は、
の厚さのレギュレーション)は、 -軸に対するレギュレーションと全く同じステップに従います。
-軸に対するレギュレーションと全く同じステップに従います。
% モデル構成要素を指定
Hy = tf(7.8e8,[1 71 88^2],'inputn','u-y')
Fiy = tf(2e4,[1 0.05],'inputn','w-iy')
Fey = tf([1e5 0],[1 0.19 9.4^2],'inputn','w-ey')
gy = 0.5e-6 % 力からギャップのゲイン
% 開ループモデルを作成
Py = append([ss(Hy) Fey],Fiy)
Py = [-gy gy;1 1] * Py
set(Py,'outputn',{'y-gap' 'y-force'})
% 状態フィードバックゲイン設計
Pydes = append(lpf,1) * Py % 低周波数重みを追加
set(Pydes,'outputn',{'y-gap*' 'y-force'})
ky = lqry(Pydes(1,1),1,1e-4)
% Kalman推定器設計
esty = kalman(Pydes(2,:),eye(2),1e3)
% y-軸に対するSISO LQG レギュレータを作成し、ループを閉じる
Regy = lqgreg(esty,ky)
cly = feedback(Py,Regy,1,2,+1)
白色ノイズ入力外乱に対する開ループ応答と閉ループ応答とを比較します。
dt = 0.01 t = 0:dt:50 wy = sqrt(1/dt) * randn(2,length(t)) lsim(Py(1,2:3),':',cly(1,2:3),'-',wy,t)
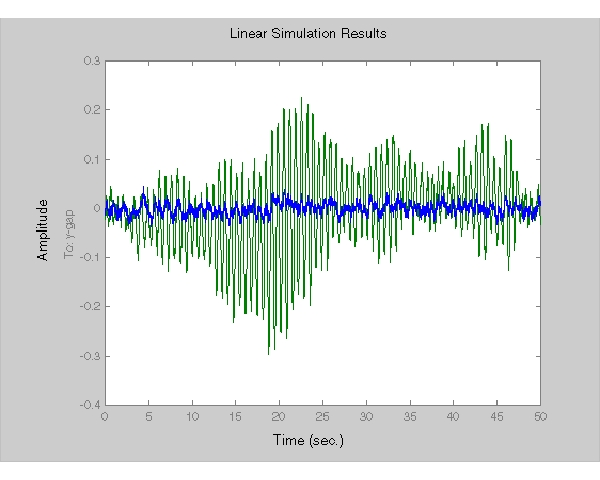
点線は、開ループ応答に対応します。シミュレーション結果は、 -軸に対する結果に匹敵します。
-軸に対する結果に匹敵します。
| | x軸に対するLQG設計 | 軸同士の相互干渉 | |