LTIモデル
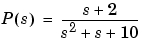
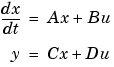
LTIモデルを、つぎのように設定できます。
ここで、A, B, C, D は適切な大きさの行列、xは状態ベクトル、uは入力ベクトル、yは出力ベクトルです。
FRDモデルは、システムの周波数応答をサンプリングしたものです。たとえば、実験で選んだ周波数応答データをFRDにストアします。