

| モデルの作成と取り扱い | |
遅れを含むシステムの離散化
c2dを使って、むだ時間を含むSISOまたはMIMO連続時間モデルを離散化することができます。Tsを離散化に使うサンプリング周期としましょう。
tau秒の遅れは、離散化されたモデルの中で、k個のサンプリング周期の遅れとなります。ここで、k = fix(tau/Ts)です。tau - k*Tsは、離散化モデルの中の係数に含ませます(この方法は、ゼロ次ホールド、一次ホールドのみ)。
を離散化するため、入力に10Hzのサンプリングレートでゼロ次ホールドを適用します。
h = tf(10,[1 3 10],'inputdelay',0.25);
hd = c2d(h,0.1)
Transfer function:
0.01187 z^2 + 0.06408 z + 0.009721
z^(-2) * ----------------------------------
z^3 - 1.655 z^2 + 0.7408 z
Sampling time: 0.1
ここで、 の中の入力遅れは、サンプリング周期0.1秒の2.5倍と見積もられます。従って、離散化モデル
の中の入力遅れは、サンプリング周期0.1秒の2.5倍と見積もられます。従って、離散化モデルhdは、hd.inputdelayの値により確認できるように、2サンプリング周期の入力遅れを継承しています。サンプリング周期より小さい遅れは、離散化アルゴリズムによってhdの係数の中に含ませています。
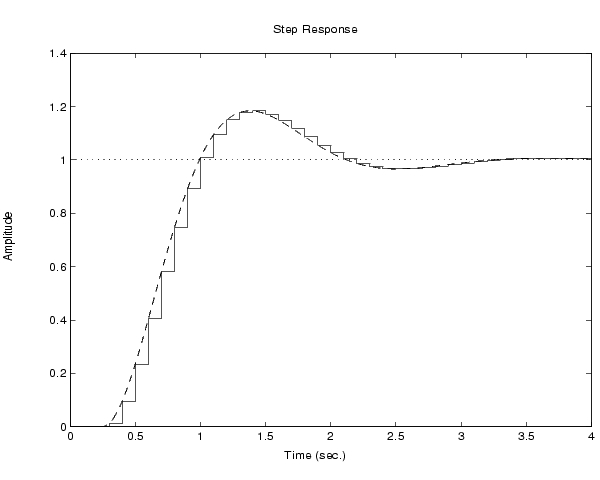
連続モデルと離散モデルのステップ応答を、つぎの図に示しています。このプロットは、つぎのコマンドで作成できます。
step(h,'--',hd,'-')
| | 極と零点のマッチング法 | 離散時間モデルのリサンプリング | |