

| 設計ケーススタディ | |
washoutフィルタ設計
ここで、必要なことは、ループを閉じたときにスパイラルモードが左半面において、より左側に移らないようにすることです。飛行制御設計者が、この問題に対処した1つの方法は、washoutフィルタ を使用することです。ここで、
を使用することです。ここで、
washoutフィルタは、原点に零点を配置するため、スパイラルモードの極は、原点近傍に限定されます。時定数を3秒とするために とし、根軌跡法を用いて、フィルタゲイン
とし、根軌跡法を用いて、フィルタゲイン を決定します。まず、washoutの固定部分
を決定します。まず、washoutの固定部分 を設定します。
を設定します。
H = zpk(0,-0.333,1);
washoutを設計モデルsys11(入力1と出力1の関係)と直列に結合し、つぎの開ループモデルを得ます。
oloop = H * sys11;
また、この開ループモデルに対して、つぎのような根軌跡を描きます。
rlocus(-oloop) sgrid
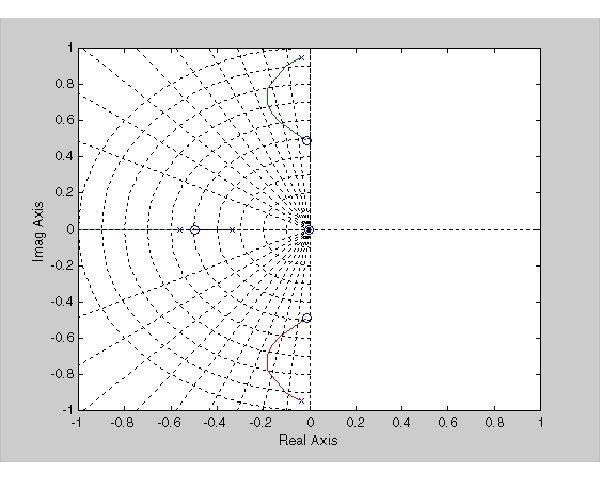
この場合、最大の減衰率は、約 となります。以下により、最大の減衰率を与えるゲインをグラフ上で選択することができます。
となります。以下により、最大の減衰率を与えるゲインをグラフ上で選択することができます。
[k,poles] = rlocfind(-oloop)
選択した極の位置は、上の根軌跡において、'+'で表示されています。結果として得られるゲインの値と閉ループダイナミクスは、以下のとおりです。
k
k =
2.5832
damp(poles)
Eigenvalue Damping Freq. (rad/s)
-1.37e+000 1.00e+000 1.37e+000
-1.76e-001 + 6.75e-001i 2.52e-001 6.98e-001
-1.76e-001 - 6.75e-001i 2.52e-001 6.98e-001
-4.74e-001 1.00e+000 4.74e-001
-3.88e-003 1.00e+000 3.88e-003
cl11 = feedback(oloop,-k); impulse(cl11,20)
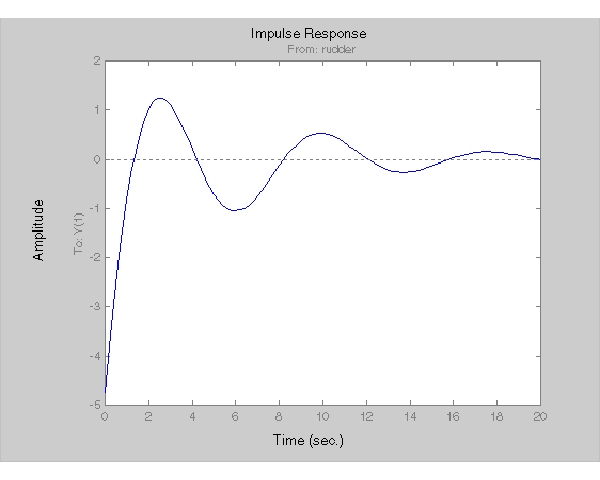
この応答は、ほど良く整定しますが、前の設計に比べて減衰が小さくなります。最後に、washouotフィルタによってスパイラルモードの問題が、解決したかどうかを確認することができます。まず、つぎの完全なwashoutフィルタ (washout +ゲイン)を構成します。
(washout +ゲイン)を構成します。
WOF = -k * H;
つぎに、MIMOモデルsysの最初のI/Oペアに関して、ループを閉じ、インパルス応答をシミュレーションします。
cloop = feedback(sys,WOF,1,1); % 最終的な閉ループインパルス応答 impulse(cloop,20)

補助翼インパルス(入力2)によるバンク角応答(出力2)は、この短い時間枠で、仕様をほぼ満足する定常特性を示すようになりました。減衰仕様を完全には満たしていませんが、この設計はシステムの減衰を実質的に大きくし、これでパイロットは飛行機を通常どおりに操縦することができます。
| | 根軌跡法による設計 | ハードディスク読み書きヘッドコントローラ | |