

| 設計ケーススタディ | |
根軌跡法による設計
最も簡単な補償器は静的ゲインなので、まず根軌跡法を用いて適切なゲインの値を決定します。
% (1,1)チャンネルに対する根軌跡をプロット rlocus(sys11)
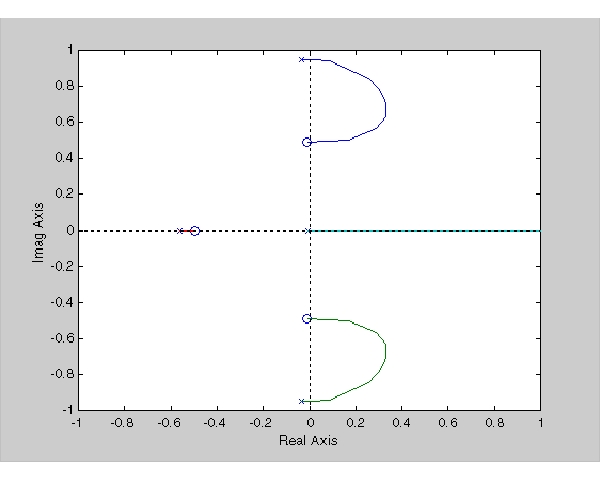
これは、負のフィードバックに対する根軌跡で、システムがほぼ瞬間的に不安定になることを示しています。その代わりに、正のフィードバックを用いるとシステムの安定性を維持することができます。
rlocus(-sys11) sgrid
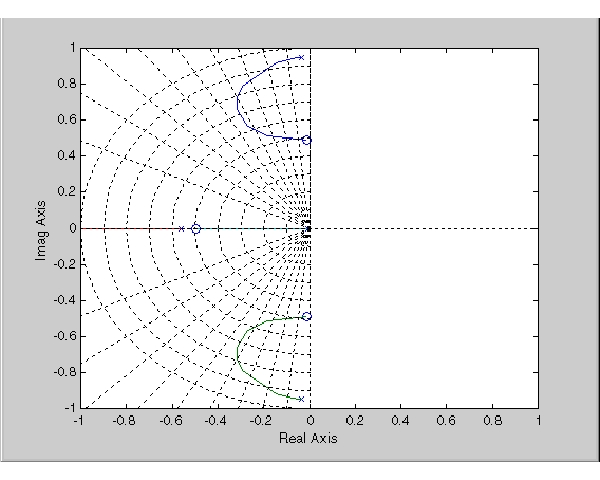
このほうが、良いように思われます。単純なフィードバックを用いるだけで、 の減衰率を達成することができます。グラフ上で、いくつかの極の位置を選択し、
の減衰率を達成することができます。グラフ上で、いくつかの極の位置を選択し、rlocfindで対応するゲインを決定することができます。
[k,poles] = rlocfind(-sys11)
上図の'+'マークは、選択可能な状態を示しています。対応するゲインと閉ループの極は、つぎのとおりです。
k
k =
2.7615
damp(poles)
Eigenvalue Damping Freq. (rad/s)
-1.01e+000 1.00e+000 1.01e+000
-3.03e-001 + 6.18e-001i 4.41e-001 6.89e-001
-3.03e-001 - 6.18e-001i 4.41e-001 6.89e-001
-3.33e-001 1.00e+000 3.33e-001
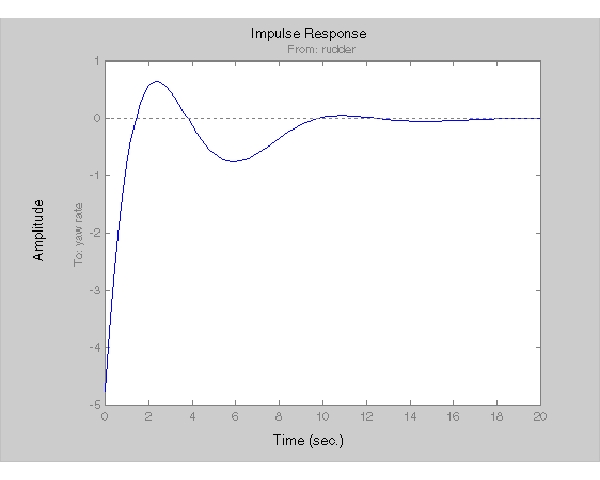
つぎに、この設計を解析できるように閉ループシステムを構成します。
cl11 = feedback(sys11,-k); % デフォルトでは負のフィードバック
閉ループ極は、上で選択した極と一致しなければなりません(実際一致します)。
damp(cl11)
Eigenvalue Damping Freq. (rad/s)
-3.33e-001 1.00e+000 3.33e-001
-3.03e-001 + 6.18e-001i 4.41e-001 6.89e-001
-3.03e-001 - 6.18e-001i 4.41e-001 6.89e-001
-1.01e+000 1.00e+000 1.01e+000
impulse(cl11,20)
ここで、最初のモデルのループを閉じて、補助翼からの応答がどのようになるかを確認します。フィードバックループには、プラントの入力1と出力1が含まれています(この入力/出力ペアを選択するインデックスベクトルを入力引数として、feedbackを使用します)。MATLABで、つぎのように入力します。
cloop = feedback(sys,-k,1,1);
damp(cloop) % 閉ループの極
MATLABは、つぎの出力を行います。
Eigenvalue Damping Freq. (rad/s)
-3.33e-001 1.00e+000 3.33e-001
-3.03e-001 + 6.18e-001i 4.41e-001 6.89e-001
-3.03e-001 - 6.18e-001i 4.41e-001 6.89e-001
-1.01e+000 1.00e+000 1.01e+000
impulse(cloop,20)
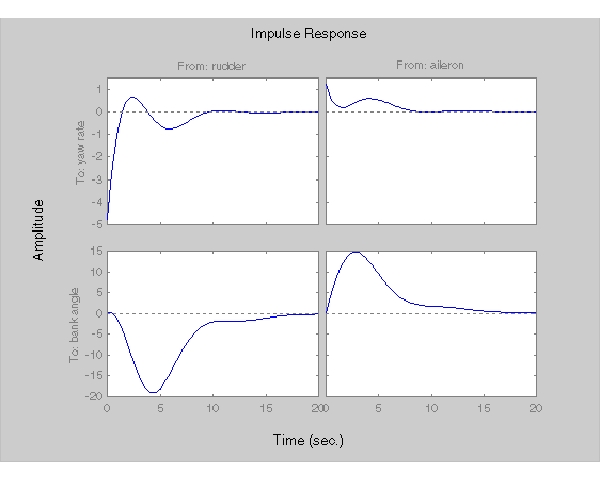
補助翼(入力2)からバンク角(出力2)への応答を見てください。補助翼をインパスル的に操作しても、制御をしていない通常の飛行機とは異なり、バンク角が元に戻っています。これは、スパイラルモードを過度に安定化したことになります。通常は、スパイラルモードは非常に遅いので、補助翼を操作し続けなくても、機体を傾けながら旋回を行うことができます。パイロットは、このような操作に慣れているので、このような操作ができないスパイラルモードを過度に安定化したこの設計は好みません。そこで、スパイラルモードを高周波数側に移動することにします。
| | 開ループ解析 | washoutフィルタ設計 | |