

| 設計ケーススタディ | |
開ループ解析
まず、開ループ解析を行って可能な制御戦略を決定します。時間応答から解析します(ここでは、stepまたはimpulseを使用します)。
impulse(sys)
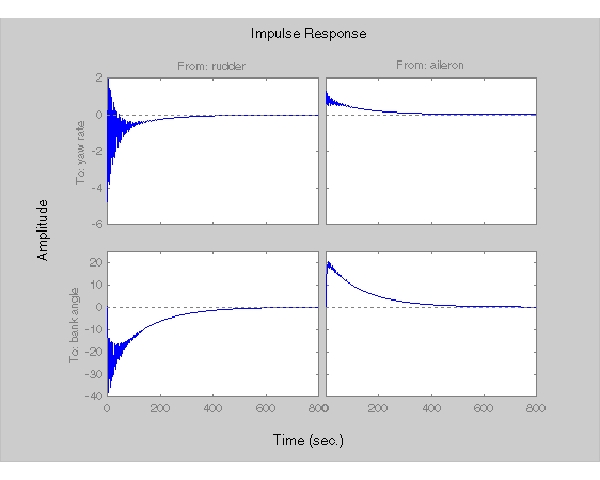
Impulse応答からシステムがやや減衰していることがわかります。しかし、乗客とパイロットは、最初の数分間ではなく、最初の数秒間の挙動に関心をもっているため、この図では、時間枠がかなり長すぎます。つぎに、20秒というさらに小さな時間枠での応答を見てみます。
impulse(sys,20)
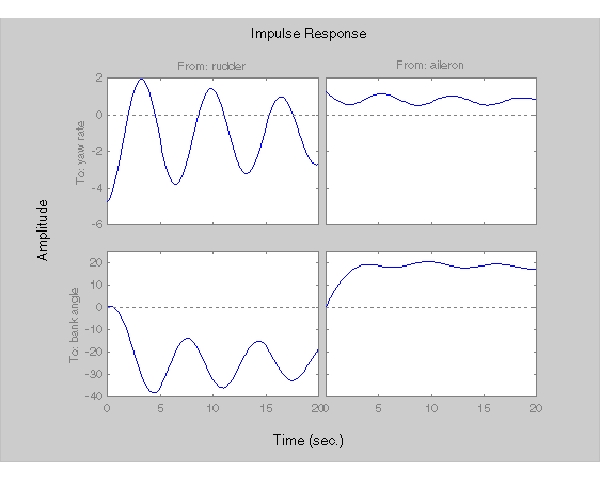
補助翼(入力2)からバンク角(出力2)までの応答を見ます。ジェット戦闘機は、非ゼロバンク角近傍で振動しています。このように、戦闘機は補助翼へのインパルス入力に応答して方向を変えています。この挙動の重要性は、このケーススタディの後半でわかります。
一般に、ヨーダンパは観測量としてヨーレートを、また制御入力として方向舵を用いて設計されます。対応する(入力1から出力1までの)周波数応答を見てください。
bode(sys(1,1))
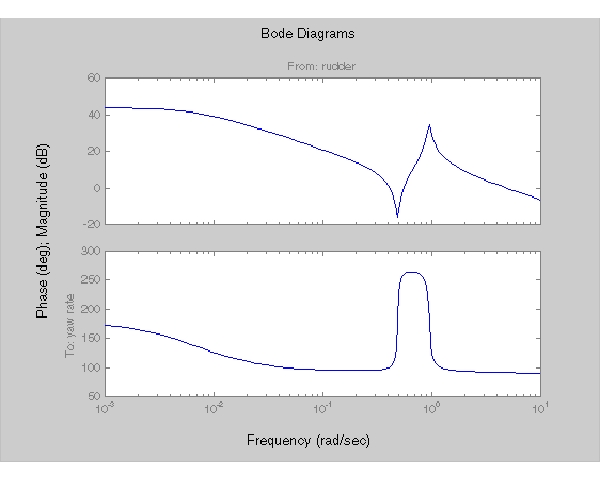
このBode線図から、方向舵がやや減衰したダッチロールモード近傍(すなわち、 ラジアン/秒の近傍)で、大きな影響をもつことが確認できます。設計を容易にするため、方向舵からヨーレートへのサブシステムを選択します。
ラジアン/秒の近傍)で、大きな影響をもつことが確認できます。設計を容易にするため、方向舵からヨーレートへのサブシステムを選択します。
% 入力1と出力1のシステムを選択 sys11 = sys(1,1);
| | 747ジェット戦闘機用のヨーダンパ | 根軌跡法による設計 | |