

| 設計ケーススタディ | |
747ジェット戦闘機用のヨーダンパ
このケーススタディは、ジェット戦闘機用のヨーダンパの設計を通じて、古典的制御系設計のためのツールを示すものです。
マッハ0.8、高度40,000フィートで巡航中のジェットモデルは、つぎのとおりです。
A = [-0.0558 -0.9968 0.0802 0.0415
0.5980 -0.1150 -0.0318 0
-3.0500 0.3880 -0.4650 0
0 0.0805 1.0000 0];
B = [ 0.00729 0.0000
-4.7500 0.00775
1.5300 0.1430
0 0];
C = [0 1 0 0
0 0 0 1];
D = [0 0
0 0];
つぎのコマンドは、LTIオブジェクトとして、この状態空間モデルを設定し、状態、入力、出力に名称を付けます。
states = {'beta' 'yaw' 'roll' 'phi'};
inputs = {'rudder' 'aileron'};
output = {'yaw' 'bank angle'};
sys = ss(A,B,C,D,'statename',states,...
'inputname',inputs,...
'outputname',outputs);
つぎのように入力することによって、LTIモデルsysを表示することができます。
a =
beta yaw roll phi
beta -0.0558 -0.9968 0.0802 0.0415
yaw 0.598 -0.115 -0.0318 0
roll -3.05 0.388 -0.465 0
phi 0 0.0805 1 0
b =
rudder aileron
beta 0.00729 0
yaw -0.475 0.00775
roll 0.153 0.143
phi 0 0
c =
beta yaw roll phi
yaw 0 1 0 0
bank angle 0 0 0 1
d =
rudder aileron
yaw 0 0
bank angle 0 0
Continuous-time model.
モデルには、2つの入力と2つの出力があります。単位は、beta(横すべり角)およびphi(バンク角)に対してはラジアン、yaw(ヨーレート)およびroll(ロールレート)に対してはラジアン/秒です。方向舵および補助翼の偏向角の単位は度です。
damp(sys)
Eigenvalue Damping Freq. (rad/s)
-7.28e-003 1.00e+000 7.28e-003
-5.63e-001 1.00e+000 5.63e-001
-3.29e-002 + 9.47e-001i 3.48e-002 9.47e-001
-3.29e-002 - 9.47e-001i 3.48e-002 9.47e-001
pzmap(sys)
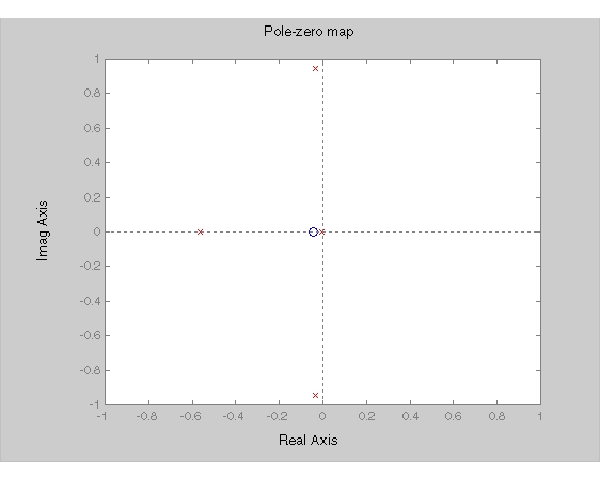
このモデルは、減衰率の小さな極を1組もっています。これらは、ダッチロールモードと呼ばれるモードに相当します。
これらの極の減衰を増加するような補償器を設計する必要があります。設計仕様は、固有周波数 ラジアン/秒、減衰率
ラジアン/秒、減衰率 とすることです。つぎに古典的手法を用いて、この補償器を設計する方法を示します。
とすることです。つぎに古典的手法を用いて、この補償器を設計する方法を示します。
| | 設計ケーススタディ | 開ループ解析 | |
 平面にプロットします。
平面にプロットします。