

| Control System Toolbox関数リファレンス | |
表示
isys = inv(sys)
詳細
inv
 をもつLTIシステム
をもつLTIシステム


この演算は、逆行列が計算できるフィードスルー行列 をもつ正方システム(入力と出力が同数)に対してのみ、定義されます。
をもつ正方システム(入力と出力が同数)に対してのみ、定義されます。invは、連続システム、離散システムのいずれも取り扱います。
例題
H = [1 tf(1,[1 1]);0 1] Hi = inv(H)
Transfer function from input 1 to output...
#1: 1
#2: 0
Transfer function from input 2 to output...
-1
#1: -----
s + 1
#2: 1
H * Hi
が、単位伝達関数(静的ゲイン)であることを確認することができます。
制限
invは、つぎのようなフィードバック結合をモデル化するためには使用しないでください。
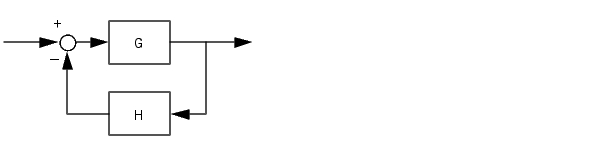
inv(1+g*h) * g
として計算することは妥当であるように見えますが、これは、通常、非最小閉ループモデルとなります。たとえば、
g = zpk([],1,1) h = tf([2 1],[1 0]) cloop = inv(1+g*h) * g
は、s = 1で不安定な極零相殺を行った3次の閉ループモデルを作成します。
cloop
Zero/pole/gain:
s (s-1)
-------------------
(s-1) (s^2 + s + 1)
feedbackまたはstarを使って、そのような問題を回避してください。
cloop = feedback(g,h)
Zero/pole/gain:
s
-------------
(s^2 + s + 1)
| | initial | isct, isdt | |
 を
を