

| モデルの作成と取り扱い | |
LTIシステム用のSimulinkブロック
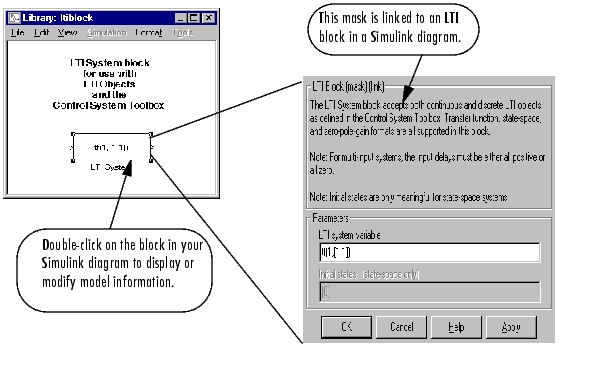
LTIオブジェクトは、下に示すLTI Systemブロックを用いてSimulinkRブロックに組み込むことができます。
ltiblock
と入力するか、メインのSimulinkライブラリのBlocksets and ToolboxesセクションからControl System Toolbox を開くことによってアクセスすることができます。
LTI Systemブロックは、上図の右に示すダイアログボックスで構成されています。LTIシステム変数(LTI system variable)と表示された編集可能なテキストボックスには、MATLABワークスペースにあるLTIオブジェクトの変数名(たとえばsys)かLTIオブジェクトを評価するMATLAB式(たとえばtf(1,[1 1])))を入力します。LTI Systemブロックは、伝達関数、零点/極/ゲイン、状態空間型のいずれかの形式の連続系LTIオブジェクトと離散系LTIオブジェクトを受け入れます。Simulinkは、シミュレーションを初期化する前にモデルを等価な状態空間モデルに変換します。
初期状態(Initial states)と表示された編集可能なテキストボックスを用いて、状態空間モデルに対する初期状態ベクトルを入力します。初期状態の概念は、伝達関数または零点/極/ゲインモデルに対しては、明確には定義されていません(実現アルゴリズムで使用する状態座標の選択によって異なります)。結果として、Simulinkブロック線図で、TFモデルまたはZPKモデルをLTIブロックに設定する場合、非ゼロの初期状態を設定できません。